Mission Gap Analysis for Upgrading a Radar System
With the advent of new technologies like unmanned aerial vehicles (UAVs), electric vertical take-off and landing (eVTOL) aircraft, and other small aircraft, airspace is becoming more crowded and trafficked than ever before. This leads to a new mission objective to detect and track smaller and differently maneuvering aircraft to ensure the safety of aircraft operating to transport people and products to their destination. This example demonstrates how to evaluate radar coverage, detection, and tracking performance. This example focuses on these two main metrics, but further metrics may be useful and necessary for additional evaluation.
Define the Mission
Let's improve the primary surveillance radar at an international airport to provide coverage over the entire city and track small targets in this crowded airspace. Right now, there is one primary radar in use by the tracking system at the airport, but it is becoming increasingly apparent that this will not be able to observe all the air traffic over the city and the surrounding mountain ridges and suburbs, called the area of interest (AOI). For this example, you will consider two options to improve the existing system:
Improve the existing radar such that it can cover more of the region
Position additional instances of the existing radar that will improve coverage in the region
Each of these two alternatives will cost approximately the same amount of money over the operational lifecycle of the radar systems. Your objective in this example is to evaluate each of the options to determine the best use of the budget allocated to upgrading the radar system.
Define the Mission Measures
Let's make a version of this for the example:
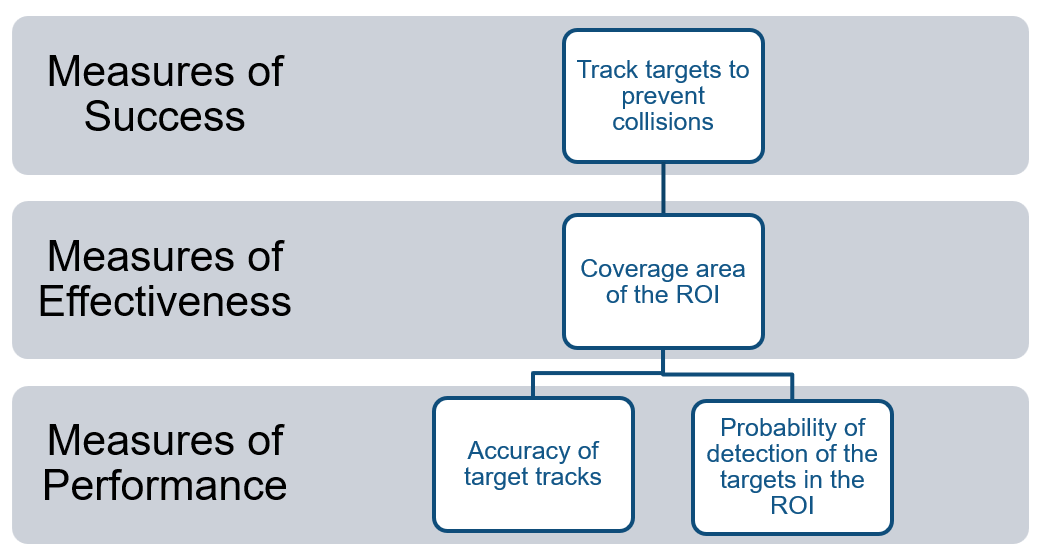
The three measures used in mission-level trade studies are as follows [1]:
Measures of Success (MOS): measurable attributes or target values for success within the overall mission in an operational environment
Measures of Effectiveness (MOE): measurable effects or target values for success that come from executing tasks and activities to achieve the MOS
Measures of Performance (MOP): measurable performance characteristics or target parameters of systems or actors used to carry out the mission tasks or effects
For this scenario, define measures for each of these levels for mission success:
MOS: Enable detection and tracking of targets in the ROI with sufficient accuracy to maintain situational awareness and ensure targets maintain a separation of at least 500 m while in flight to prevent collisions.
MOE: Cover at least 75% of the ROI.
MOPs: Range at which tracks maintain a root-mean-square (RMS) positional accuracy of at most 100 m. Probability with which airborne targets are detected in the ROI when targets are flying at least 500 m above the surface.
% Set random seed for reproducibility rng default % Load the area of interest load("MissionGapAnalysisData.mat","wptsROI") clear measures measures.MinAltitude = 1000; % meters above WGS84 ellipsoid measures.TargetRCS = 1; % meters-squared measures.RegionOfInterest = polyshape(wptsROI); measures.AreaOfInterest = geopolyshape(wptsROI(:,1),wptsROI(:,2)); measures.MinCoverage = 0.75; measures.MaxRMS = 100; % meters measures.MinDetect = 0.9;
Analyze Radar Coverage
Baseline Radar
Use helperDesignRadar to load the baseline radar parameters.
% Baseline Radar Location baselineRdrLat = 40.786444; baselineRdrLon = -111.978131; baselineRdrGndHt = helperGroundAltitude(baselineRdrLat,baselineRdrLon); baselineRdrTwrHt = 10; % Antenna height (m) baselineRdrAlt = baselineRdrGndHt + baselineRdrTwrHt; baselineRdrLLA = [baselineRdrLat, baselineRdrLon, baselineRdrAlt]; % Design the baseline radar system using the output of the Radar Designer % application baselineRdrParams = helperDesignRadar("Baseline Radar")
baselineRdrParams=26×2 table
Parameter Baseline_Radar
________________________ ___________________
{'AzimuthBeamwidth' } {[ 3.0326 3.0326]}
{'CFARMethod' } {["CA" ]}
{'CFARNumCells' } {[ 20]}
{'ElevationBeamwidth' } {[ 3.0326 3.0326]}
{'Frequency' } {[ 6.0000e+09]}
{'Gain' } {[35.4691 35.4691]}
{'Height' } {[ 100]}
{'MaxSpeed' } {[ 6.2457]}
{'NoiseTemperature' } {[ 290]}
{'NumCPIs' } {[ 1]}
{'NumCoherentPulses' } {[ 1]}
{'NumNonCoherentPulses'} {[ 1]}
{'PRF' } {[ 500]}
{'PeakPower' } {[ 1800]}
{'Pfa' } {[ 1.0000e-06]}
{'Polarization' } {["H" ]}
⋮
Show the location of the baseline radar and the area of interest where coverage will be measured.
mapFigure = figure(Visible="on"); g = geoaxes(mapFigure,Basemap="satellite"); hold(g,"on"); hRdr = geoplot(g,baselineRdrLLA(:,1),baselineRdrLLA(:,2),"yo",LineWidth=6,MarkerSize=1); hRoi = geoplot(g,measures.AreaOfInterest,"y",EdgeColor="y",LineWidth=1);
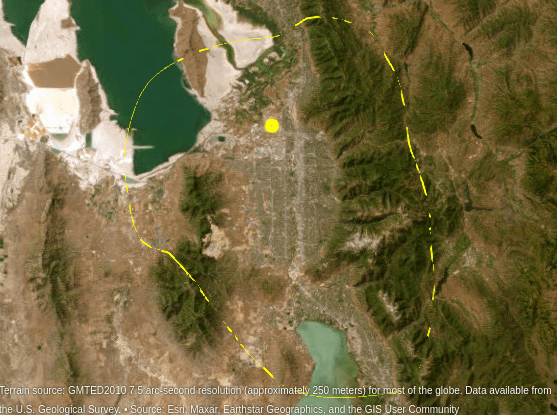
Create a grid of points uniformly distributed across the area of interest. Stack targets at multiple heights at each latitude and longitude to determine the lowest target elevation that can be detected at that location. This grid of points is based on the city, the surrounding suburbs, and typical aircraft routes in the area.
delta = 0.02; % Target spacing in latitude and longitude (degrees) tgtHgtsAGL = 40:20:1000; % Target spacing above ground level (meters) [tgtLLA,hTgts,R] = helperRadarCoverageTargetGrid(measures.AreaOfInterest,delta,tgtHgtsAGL,g);
helperRadarCoverageAnalysis computes the signal to noise ratio (SNR) and line of sight visibility for each point in the target grid. The returned, minimum height corresponds to the lowest target elevation for a latitude and longitude with line of sight from the radar to the target and sufficient SNR to be detected by the radar. Use helperRadarCoverageAnalysis to compute the minimum target height for each latitude and longitude location in the target grid.
earth = wgs84Ellipsoid; scenario = setupScenario(tgtLLA); baselineRdrMinHtsIdx = helperRadarCoverageAnalysis(baselineRdrParams, baselineRdrLLA, tgtLLA, measures, scenario, earth);
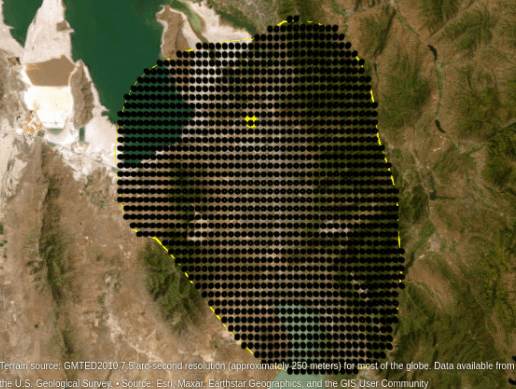
Plot the radar coverage over the target grid. The target grid location colors are assigned according to the lowest detectable target height. The black region represents the area where targets cannot be detected with the required probability of detection.
hts = radarCoverageRaster(baselineRdrMinHtsIdx,tgtHgtsAGL,tgtLLA,R); hDets = geopcolor(g,hts,R); title(g,"Baseline") ylabel(colorbar(g),"Height Above Ground (m)")
Calculate the fraction of the area of interest covered by the baseline radar. The objective based on our MOE as stated above is to maximize this fraction.
radarCoverageFraction(baselineRdrMinHtsIdx)
Percent area coverage:
0.3557
The gap in the baseline radar's coverage is evident. The baseline radar's coverage is well below the 75% established as a measure of effectiveness for this mission.
Enhanced Radar
Use helperDesignRadar to load in the design parameters for the enhanced radar. Compute the coverage for the enhanced radar. For this option, the enhanced radar increases the peak power and number of coherently integrated pulses for the existing radar to improve its maximum detection range.
enhancedRdrParams = helperDesignRadar("Enhanced Radar")enhancedRdrParams=26×2 table
Parameter Enhanced_Radar
________________________ ___________________
{'AzimuthBeamwidth' } {[ 3.0326 3.0326]}
{'CFARMethod' } {["CA" ]}
{'CFARNumCells' } {[ 20]}
{'ElevationBeamwidth' } {[ 3.0326 3.0326]}
{'Frequency' } {[ 6.0000e+09]}
{'Gain' } {[35.4691 35.4691]}
{'Height' } {[ 100]}
{'MaxSpeed' } {[ 6.2457]}
{'NoiseTemperature' } {[ 290]}
{'NumCPIs' } {[ 1]}
{'NumCoherentPulses' } {[ 1]}
{'NumNonCoherentPulses'} {[ 10]}
{'PRF' } {[ 500]}
{'PeakPower' } {[ 3600]}
{'Pfa' } {[ 1.0000e-06]}
{'Polarization' } {["H" ]}
⋮
enhancedRdrLLA = baselineRdrLLA; enhancedRdrMinHtsIdx = helperRadarCoverageAnalysis(enhancedRdrParams, enhancedRdrLLA, tgtLLA, measures, scenario, earth);
Show the coverage for the enhanced radar.
hts = radarCoverageRaster(enhancedRdrMinHtsIdx,tgtHgtsAGL,tgtLLA,R);
hDets.ColorData = hts;
title(g,"Enhanced")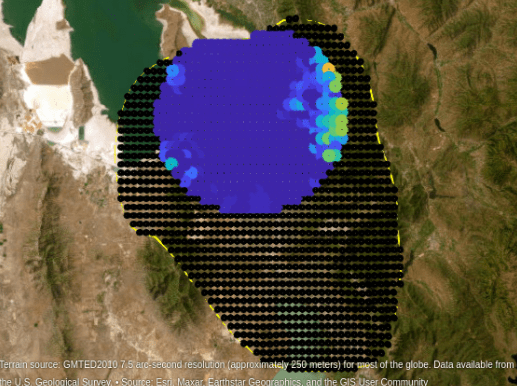
radarCoverageFraction(enhancedRdrMinHtsIdx)
Percent area coverage:
0.4672
The enhanced radar increases the coverage area over the baseline radar, but a large portion of the region to the south remains undetected by the radar.
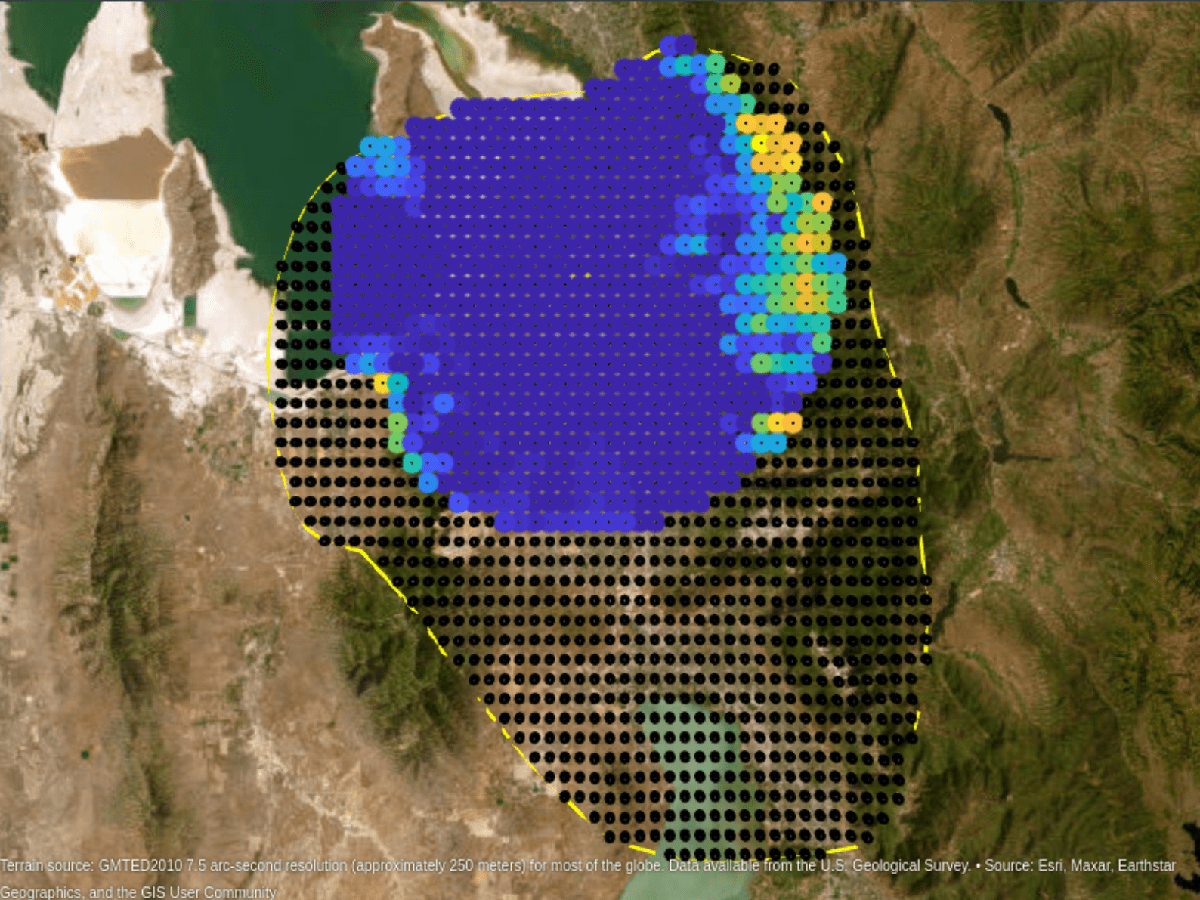
Multiple Radars
The multiple radar option repeats the same baseline radar configuration at two additional sites. These sites were chosen because of their ideal placement on top of ridges in strategic positions in the ROI without previously existing buildings. See the Planning Radar Network Coverage over Terrain example for details on how to select locations to optimize radar coverage.
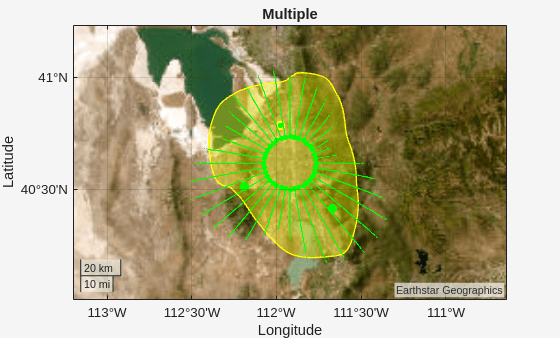
Compute the radar coverage for the multiple radar option.
multRdrLat = [baselineRdrLat - 0.2735, baselineRdrLat - 0.371]; multRdrLon = [baselineRdrLon - 0.209, baselineRdrLon + 0.3105]; multRdrAlt = helperGroundAltitude(multRdrLat,multRdrLon) + 20; multRdrLLA = [baselineRdrLLA; multRdrLat(:) multRdrLon(:) multRdrAlt(:)]; multiRdrParams = helperDesignRadar("Multiple Radars"); multRdrMinHtsIdx = helperRadarCoverageAnalysis(multiRdrParams, multRdrLLA, tgtLLA, measures, scenario, earth); hts = radarCoverageRaster(multRdrMinHtsIdx,tgtHgtsAGL,tgtLLA,R); hDets.ColorData = hts; hMultRdr = geoplot(g,multRdrLLA(2:end,1),multRdrLLA(2:end,2),"go",LineWidth=6,MarkerSize=1); uistack(hRdr,"top") title(g,"Multiple")

radarCoverageFraction(multRdrMinHtsIdx)
Percent area coverage:
0.7956
The multiple radar option achieves the 75% measure of effectiveness required for this mission but covers less of the mountain ridge near the airport than the enhanced radar.
Analyze Radar Tracks
The coverage analysis in the preceding section shows that the multiple radar option satisfies the measure of effectiveness for the mission, but the mission measure of performance requires analysis of the radar tracks.
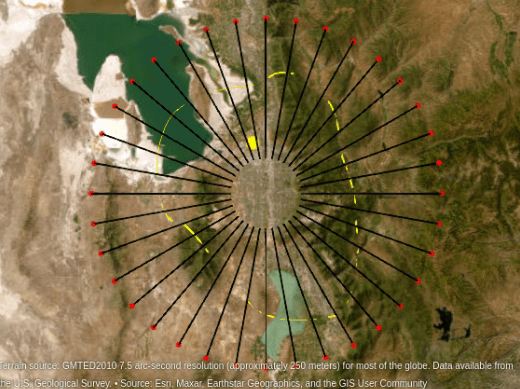
Create a scenario with inbound targets spaced every 10 degrees at the center of the area of interest. Use track metrics for each of these targets to compute the percent of time the targets are tracked inside the area of interest and the range where the RMS position accuracy is achieved.
[lat0, lon0] = centroid(measures.RegionOfInterest); alt0 = helperGroundAltitude(lat0,lon0); lla0 = [lat0 lon0 alt0]; % Define end point for target trajectories endLLA = [lat0 lon0 measures.MinAltitude].'; % Define starting points for target trajectories tgtAz = 0:10:359; tgtRg = 65e3; [tgtNorth,tgtEast] = pol2cart(-deg2rad(tgtAz),tgtRg); [tgtLat,tgtLon] = enu2geodetic(tgtEast(:),tgtNorth(:),zeros(numel(tgtEast),1),endLLA(1),endLLA(2),endLLA(3),earth); startLLA = [tgtLat(:) tgtLon(:) measures.MinAltitude*ones(numel(tgtAz),1)].'; scenario = setupScenario([startLLA endLLA]); plat = platform(scenario,Position=baselineRdrLLA);
Use helperDesignRadar to configure the baseline radarDataGenerator sensor model. The radarDataGenerator is a measurement level model of the radar system that uses probability of detection, probability of false alarm, and information about noise and biases in the scenario and radar system to generate tracks representative of what the radar systems under test would produce.
baselineRadar = helperDesignRadar(baselineRdrParams);
To simplify the simulation, set the azimuth field of view for the radar to 360 degrees to model a radar that reports tracks at the completion of each 360-degree scan. This avoids the need to collect track metrics at all intermediate scan positions.
baselineRadar.ScanMode = "No scanning";
baselineRadar.FieldOfView(1) = 360;Set the radar to report tracks in the scenario frame. Ensure the INS input on the radar is enabled so that the detections can be transformed into the scenario frame by the tracker.
baselineRadar.HasINS = true; baselineRadar.TargetReportFormat = "Tracks"; baselineRadar.TrackCoordinates = "Scenario";
Disable false alarm reporting to simplify the collection and analysis of the track metrics.
baselineRadar.HasFalseAlarms = false;
Attach the baseline radar to the radar platform in the scenario.
plat.Sensors = baselineRadar;
Specify the speed and minimum height above the ground for the targets. Use helperRadarTrackTargets to generate the trajectories from the starting and ending waypoints for the radially inbound targets.
kts2mps = unitsratio("m","km")/3600; tgtSpd = 300*kts2mps; minHtAGL = 500; wpts = helperRadarTrackTargets(scenario,tgtSpd,minHtAGL,startLLA,endLLA,measures,earth);
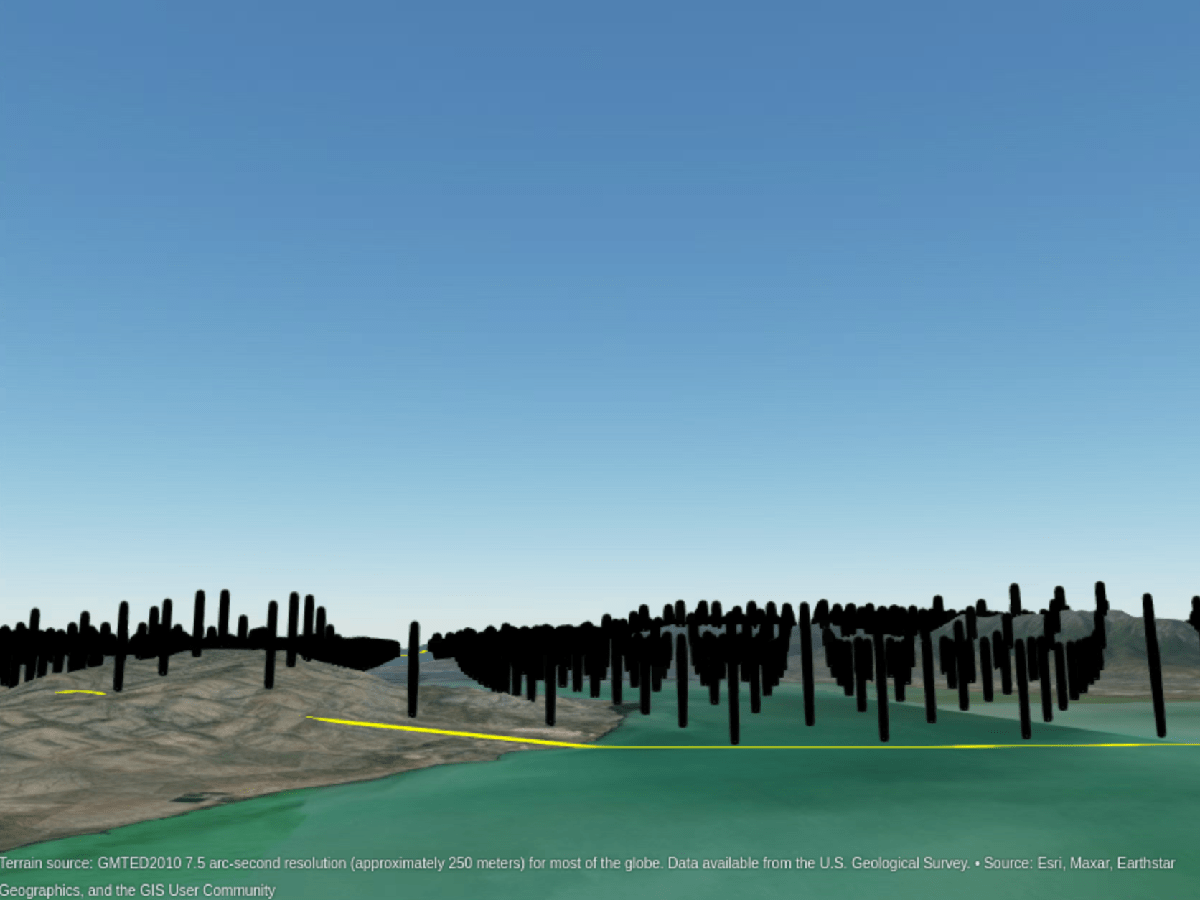
Visualize the target trajectories. The targets are the red circles on the map and the black lines are the trajectories the targets will follow as they move into the area of interest.
delete(hTgts) delete(hMultRdr) delete(hDets) title(g,"Baseline") colorbar(g,"off"); tgts = scenario.Platforms(2:end); numTgts = numel(tgts); tgtLLA = NaN(numTgts,3); for iTgt = 1:numTgts thisTgt = tgts{iTgt}; tgtLLA(iTgt,:) = thisTgt.Trajectory.Waypoints(1,:); end hTgts = gobjects(2,1); hTgts(1) = geoplot(g,tgtLLA(:,1),tgtLLA(:,2),"ro",MarkerSize=0.5,LineWidth=2); hTgts(2) = geoplot(g,wpts(1,:),wpts(2,:),"k-",LineWidth=1); geolimits(g,"manual");
Baseline Radar
Use helperRadarTrackAnalysis to run the simulation and collect the track metrics. During the simulation, you will see the red targets moving radially inward towards the center of the area of interest. The target tracks are shown in green.
[baselineMetrics,hTgts] = helperRadarTrackAnalysis(scenario, earth, g, hTgts);


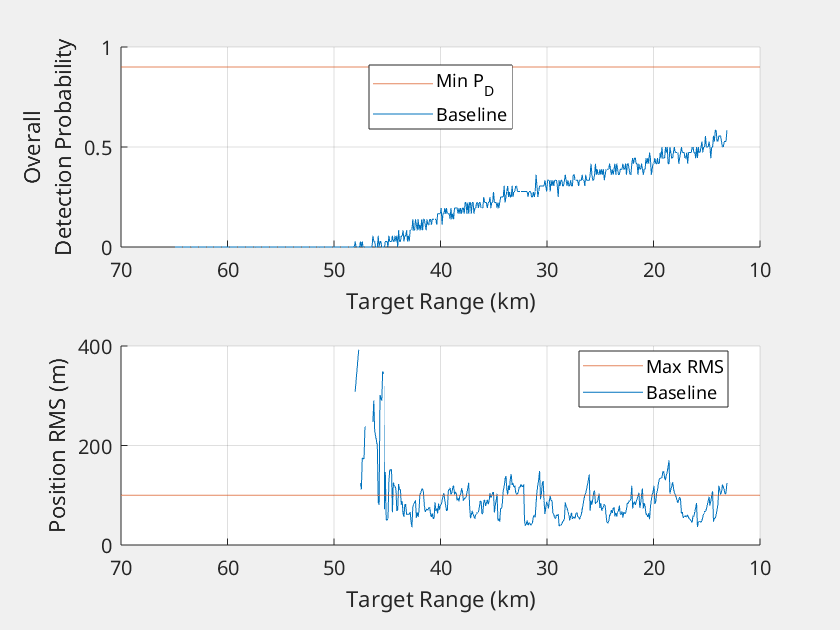
Plot the overall probability of detection and positional track RMS accuracy as a function of their range from the center of the area of interest.
metricsFigure = figure; tl = tiledlayout(metricsFigure,2,1); hLineB = helperPlotTrackMetrics(tl,baselineMetrics,measures,lla0,earth); set(hLineB,"DisplayName","Baseline")

The plot on the top shows the overall detection probability observed in the simulation across all inbound targets. The plot on the bottom shows the overall position RMS across all targets. The baseline radar is unable to meet either of these measures of performance for this mission.
Enhanced Radar
Use helperDesignRadar to configure the radarDataGenerator sensor model for the enhanced radar and reproduce the track analysis.
enhancedRadar = helperDesignRadar(enhancedRdrParams); enhancedRadar.SensorIndex = 2; enhancedRadar.ScanMode = "No scanning"; enhancedRadar.FieldOfView(1) = 360; enhancedRadar.HasINS = true; enhancedRadar.TargetReportFormat = "Tracks"; enhancedRadar.TrackCoordinates = "Scenario"; enhancedRadar.HasFalseAlarms = false; plat.Sensors = enhancedRadar; figure(mapFigure) title(g,"Enhanced") [enhancedMetrics,hTgts] = helperRadarTrackAnalysis(scenario, earth, g, hTgts);
figure(metricsFigure) hLineE = helperPlotTrackMetrics(tl,enhancedMetrics,measures,lla0,earth); set(hLineE,"DisplayName","Enhanced")
As already seen in the radar coverage analysis, the enhanced radar provides higher detection probabilities at ranges much farther from the center of the area of interest. The overall track quality is much better as well, with the overall position RMS error staying below the 100 m requirement at around 25 km.
Multiple Radars
Finally, apply the same simulation and track analysis to the second radar improvement option which places two identical radars in the area of interest to provide detections to a central tracker in addition to the detections reported by the existing baseline radar.
figure(mapFigure) title(g,"Multiple") hMultRdr = geoplot(g,multRdrLLA(2:end,1),multRdrLLA(2:end,2),"go",LineWidth=6,MarkerSize=1); % Create scenario with multiple radar sites scenario = setupScenario([startLLA endLLA]); radar = clone(baselineRadar); release(radar); radar.TargetReportFormat = "Clustered detections"; radar.DetectionCoordinates = "Sensor spherical"; for iPlat = 1:size(multRdrLLA,1) plat = platform(scenario,Position=multRdrLLA(iPlat,:)); thisRadar = clone(radar); thisRadar.SensorIndex = iPlat; plat.Sensors = thisRadar; end helperRadarTrackTargets(scenario,tgtSpd,minHtAGL,startLLA,endLLA,measures,earth); [multMetrics,hTgts] = helperRadarTrackAnalysis(scenario, earth, g, hTgts);
figure(metricsFigure) hLineM = helperPlotTrackMetrics(tl,multMetrics,measures,lla0,earth); set(hLineM,"DisplayName","Multiple")
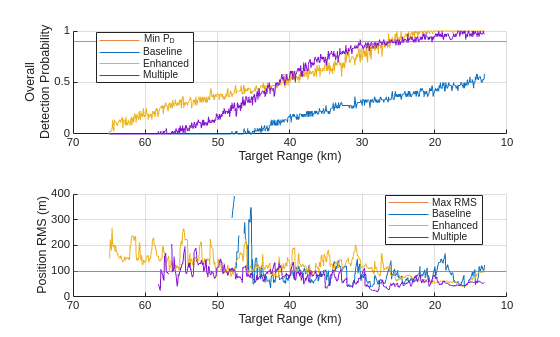
Multiple radar locations demonstrate better overall detection performance than the enhanced radar at about 40 km. Both options attain the required detection probability at approximately 25 km. The positional RMS errors are maintained below the 100 m threshold at much longer ranges than with the enhanced radar.
Conclusion
In this example, you evaluated two proposed improvements for an existing radar system to satisfy a new mission objective. One option was to improve the existing radar to improve its maximum detection range. The other option was to add two additional radar sites that are operationally equivalent to the existing radar, with all three radars sharing their detections with a central tracker.
These two options will cost the same amount of money but led to different outcomes as demonstrated by the analysis. The first alternative architecture, an enhanced radar, was an improvement over the baseline and enabled more coverage of the area of interest. The enhanced radar enabled coverage of 47% of the area of interest. Both the enhanced and multiple radar options attained the required overall detection probability of 90% at approximately 25 km. However, the multiple radar option satisfied the coverage requirement for the area of interest with approximately 80% coverage. The multiple radar option also achieved a lower RMS track position error than the enhanced radar option, especially at longer ranges from the center of the area of interest.
The conclusion from this analysis is to invest in installing two new radar site locations at strategic positions on the ridges neighboring the city.
Reference
[1] Office of the Under Secretary of Defense for Research and Engineering. Department of Defense Mission Engineering Guide (MEG) version 2.0. 1 Oct. 2023, https://ac.cto.mil/wp-content/uploads/2023/11/MEG_2_Oct2023.pdf.
Helper Functions
function scenario = setupScenario(wptsLLA) % Returns scenario with land surface added with terrain covering the full % region defined in wptsLLA if isstruct(wptsLLA) latLim = [inf, -inf]; lonLim = [inf, -inf]; for ii = 1:numel(wptsLLA) lla = wptsLLA(ii).LLA; [latMin, latMax] = bounds(lla(1,:)); [lonMin, lonMax] = bounds(lla(2,:)); latLim(1) = min(latMin, latLim(1)); latLim(2) = max(latMax, latLim(2)); lonLim(1) = min(lonMin, lonLim(1)); lonLim(2) = max(lonMax, lonLim(2)); end else [latMin, latMax] = bounds(wptsLLA(1,:)); [lonMin, lonMax] = bounds(wptsLLA(2,:)); latLim = [latMin latMax]; lonLim = [lonMin lonMax]; end scenario = radarScenario(UpdateRate=0,IsEarthCentered=true); % Load digital elevation map to model terrain layers = wmsfind("mathworks","SearchField","serverurl"); elevation = refine(layers,"elevation"); [A,R] = wmsread(elevation,Latlim=latLim,Lonlim=lonLim, ... ImageFormat="image/bil"); % The elevation map contains orthometric heights referenced to the EGM96 % geoid. Use egm96geoid to convert these heights to ellipsoidal heights % referenced to the WGS84 ellipsoid. % Reference heights to the WGS84 ellipsoid N = egm96geoid(R); Z = double(A) + N; landSurface(scenario,Terrain=flipud(Z).', ... Boundary=[R.LatitudeLimits;R.LongitudeLimits]); end function minHts = radarCoverageRaster(minHt,hgtsAGL,tgtLLA,R) % Plots the radar coverage showing the minimum height targets can be % detected at. Returns the graphics handle to the plotted coverage map. minHts = NaN(R.RasterSize); numTgtHts = size(tgtLLA,3); for iHt = 1:numTgtHts isThis = minHt==iHt; if any(isThis) theseTgts = tgtLLA(:,:,iHt); [row,col] = geographicToDiscrete(R,theseTgts(1,isThis),theseTgts(2,isThis)); idx = sub2ind(R.RasterSize,row,col); minHts(idx) = hgtsAGL(iHt); end end end function radarCoverageFraction(minHt) % Returns the fraction of the area where targets are detectable numTot = numel(minHt); numDet = sum(isfinite(minHt(:))); disp("Percent area coverage:") disp(numDet/numTot) end
See Also
radarDataGenerator | radarScenario | geoplot3 (Mapping Toolbox) | geoglobe (Mapping Toolbox)