Mapping and Localization
Lidar scan mapping, and particle filter localization
Create maps of environments using occupancy grids and localize using a sampling-based recursive Bayesian estimation algorithm using lidar sensor data from your robot.
Functions
Topics
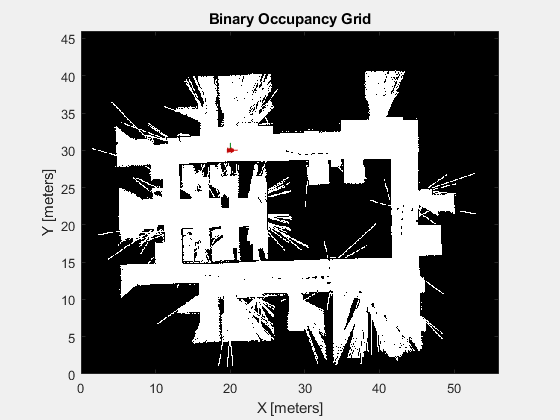
Mapping
- Occupancy Grids
Details of occupancy grid functionality and map structure.
State Estimation
- Particle Filter Parameters
To use thestateEstimatorPFparticle filter, you must specify parameters such as the number of particles, the initial particle location, and the state estimation method. - Particle Filter Workflow
A particle filter is a recursive, Bayesian state estimator that uses discrete particles to approximate the posterior distribution of the estimated state.
Featured Examples
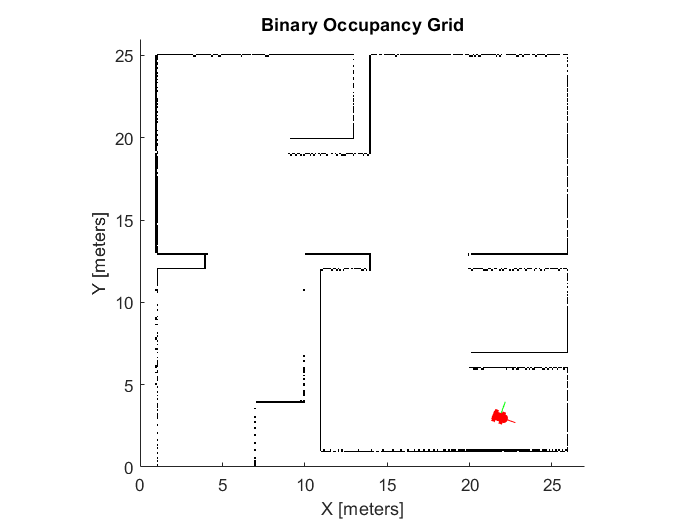
Mapping with Known Poses
Create a map of an environment using range sensor readings and robot poses to drive a differential drive robot.
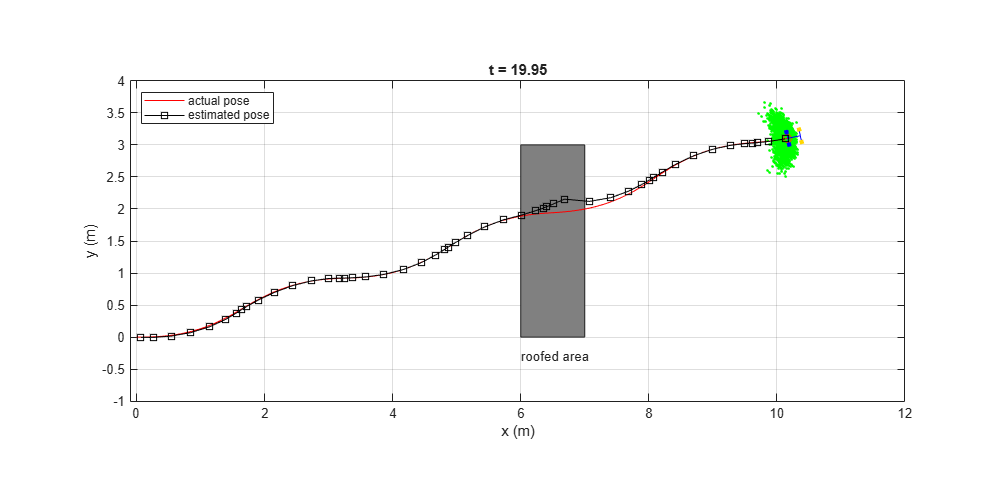
Track a Car-Like Robot Using Particle Filter
Use state estimation particle filter to reduce noise effects and get a more accurate estimation of the robot pose.
Avoid Obstacles Using Reinforcement Learning for Mobile Robots
Use DDPG based reinforcement learning to develop an obstacle avoidance strategy for a mobile robot.