Generate a Trajectory Using a Set of Waypoints for KINOVA Gen3 Robot End-Effector
This example shows how to generate and interpolate trajectories from a set of waypoints. This example covers common ways of generating trajectories for robot arms such as cubic polynomials, quintic polynomials, and trapezoidal trajectories.
Before proceeding further, see the example Track Pre-Computed Trajectory of Kinova Gen3 Robot End-Effector Using Inverse Kinematics and KINOVA KORTEX MATLAB API. This provides you information on inverse kinematic for robotic manipulators and sending commands to Kinova® Gen3 robot to track pre-computed trajectories.
Clear all output in the live script by right clicking anywhere in the live script and then clicking ‘Clear All Output’ or navigate to VIEW > Clear all Output.
Create the Robot Model
Create a Rigid Body Tree for Gen3 robot, set the home configuration and calculate the transformation at the home configuration:
gen3 = loadrobot("kinovaGen3"); gen3.DataFormat = 'column'; q_home = [0 15 180 -130 0 55 90]'*pi/180; eeName = 'EndEffector_Link'; T_home = getTransform(gen3, q_home, eeName); T_home(1:4,4) = [0;0;0;1];
Visualize the Robot at Home Configuration
show(gen3,q_home);
axis auto;
view([60,10]); 
Define a Set of Waypoints Based on the Tool Position
toolPositionHome = [0.455 0.001 0.434]; waypoints = toolPositionHome' + ... [0 0 0 ; -0.1 0.2 0.2 ; -0.2 0 0.1 ; -0.1 -0.2 0.2 ; 0 0 0]';
Define orientation.
The orientation is represented in Euler angles and the convention used is the Tait-Bryan, extrinsic ZYX.
orientations = [pi/2 0 pi/2;
(pi/2)+(pi/4) 0 pi/2;
pi/2 0 pi;
(pi/2)-(pi/4) 0 pi/2;
pi/2 0 pi/2]';Define array of waypoint times.
waypointTimes = 0:7:28; ts = 0.25; trajTimes = 0:ts:waypointTimes(end);
Define boundary conditions for velocity and acceleration.
waypointVels = 0.1 *[ 0 1 0;
-1 0 0;
0 -1 0;
1 0 0;
0 1 0]';
waypointAccels = zeros(size(waypointVels));
waypointAccelTimes = diff(waypointTimes)/4;Create Inverse Kinematics Solver and Set Parameters
ik = inverseKinematics('RigidBodyTree',gen3);
ikWeights = [1 1 1 1 1 1];
ikInitGuess = q_home';
ikInitGuess(ikInitGuess > pi) = ikInitGuess(ikInitGuess > pi) - 2*pi;
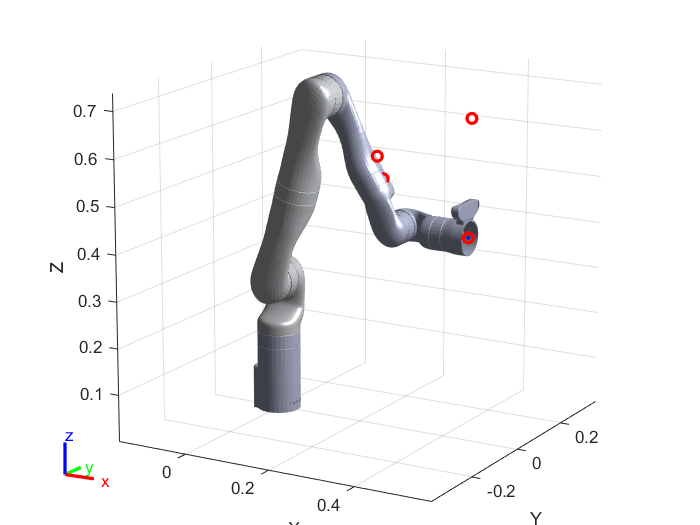
ikInitGuess(ikInitGuess < -pi) = ikInitGuess(ikInitGuess < -pi) + 2*pi;Set Plot and Display Waypoints
plotMode = 1; % 0 = None, 1 = Trajectory, 2 = Coordinate Frames show(gen3,q_home,'Frames','off','PreservePlot',false); hold on if plotMode == 1 hTraj = plot3(waypoints(1,1),waypoints(2,1),waypoints(3,1),'b.-'); end plot3(waypoints(1,:),waypoints(2,:),waypoints(3,:),'ro','LineWidth',2); axis auto; view([30 15]);
Solve the Inverse Kinematics for Each Waypoint
Set includeOrientation to zero if you do not want to define different orientation at different waypoints. When includeOrientation is set to false, a default orientation is used to compute the trajectory.
includeOrientation = true; numWaypoints = size(waypoints,2); numJoints = numel(gen3.homeConfiguration); jointWaypoints = zeros(numJoints,numWaypoints); for idx = 1:numWaypoints if includeOrientation tgtPose = trvec2tform(waypoints(:,idx)') * eul2tform(orientations(:,idx)'); else tgtPose = trvec2tform(waypoints(:,idx)') * eul2tform([pi/2 0 pi/2]); %#ok<UNRCH> end [config,info] = ik(eeName,tgtPose,ikWeights',ikInitGuess'); jointWaypoints(:,idx) = config'; end
Generate a Trajectory in Joint Space using Interpolation
Select method of interpolation from trapezoidal velocity profiles, third-order polynomial, fifth-order polynomial or B-spline polynomial by modifying the variable trajType.
trajType = 'trap'; switch trajType case 'trap' [q,qd,qdd] = trapveltraj(jointWaypoints,numel(trajTimes), ... 'AccelTime',repmat(waypointAccelTimes,[numJoints 1]), ... 'EndTime',repmat(diff(waypointTimes),[numJoints 1])); case 'cubic' [q,qd,qdd] = cubicpolytraj(jointWaypoints,waypointTimes,trajTimes, ... 'VelocityBoundaryCondition',zeros(numJoints,numWaypoints)); case 'quintic' [q,qd,qdd] = quinticpolytraj(jointWaypoints,waypointTimes,trajTimes, ... 'VelocityBoundaryCondition',zeros(numJoints,numWaypoints), ... 'AccelerationBoundaryCondition',zeros(numJoints,numWaypoints)); case 'bspline' ctrlpoints = jointWaypoints; % Can adapt this as needed [q,qd,qdd] = bsplinepolytraj(ctrlpoints,waypointTimes([1 end]),trajTimes); % Remove the first velocity sample qd(:,1) = zeros (7,1); otherwise error('Invalid trajectory type! Use ''trap'', ''cubic'', ''quintic'', or ''bspline'''); end
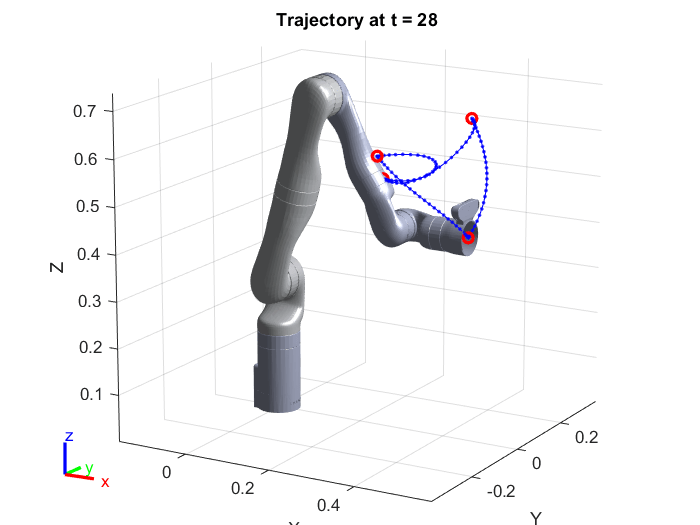
Visualize the Solution
for idx = 1:numel(trajTimes) config = q(:,idx)'; % Find Cartesian points for visualization eeTform = getTransform(gen3,config',eeName); if plotMode == 1 eePos = tform2trvec(eeTform); set(hTraj,'xdata',[hTraj.XData eePos(1)], ... 'ydata',[hTraj.YData eePos(2)], ... 'zdata',[hTraj.ZData eePos(3)]); elseif plotMode == 2 plotTransforms(tform2trvec(eeTform),tform2quat(eeTform),'FrameSize',0.05); end % Show the robot show(gen3,config','Frames','off','PreservePlot',false); title(['Trajectory at t = ' num2str(trajTimes(idx))]) drawnow end
Send the Trajectory to the Hardware
Expected motion of the robot (Assuming you are starting from the retract position)
Press ‘y’ and hit enter if you want to command the Kinova Gen3 robot to track the calculated trajectory or hit enter to finish the example.
prompt = 'Do you want to send same trajectory to the hardware? y/n [n]: '; str = input(prompt,'s'); if isempty(str) str = 'n'; end if str == 'n' clear; return; end
Command Kinova Gen3 robot to track the pre-computed trajectory
q = q*180/pi; qd = qd*180/pi; qdd = qdd*180/pi; timestamp = (0:0.001:waypointTimes(end))'; qs_deg = interp1(trajTimes',q',timestamp); vel = interp1(trajTimes',qd',timestamp); acc = interp1(trajTimes',qdd',timestamp);
Connect to the robot
Simulink.importExternalCTypes(which('kortex_wrapper_data.h')); gen3Kinova = kortex(); gen3Kinova.ip_address = '192.168.1.10'; gen3API.user = 'admin'; gen3API.password = 'admin'; isOk = gen3Kinova.CreateRobotApisWrapper(); if isOk disp('You are connected to the robot!'); else error('Failed to establish a valid connection!'); end
Visualize the actual movement of the robot
title('Actual Movement of the Robot'); [~,~, actuatorFb, ~] = gen3Kinova.SendRefreshFeedback(); show(gen3, ((actuatorFb.position)*pi/180)','Frames','off','PreservePlot',false); drawnow;
Send Robot to Starting Point of the Trajectory
jointCmd = wrapTo360(qs_deg(1,:)); constraintType = int32(0); speed = 0; duration = 0; isOk = gen3Kinova.SendJointAngles(jointCmd, constraintType, speed, duration); if isOk disp('success'); else disp('SendJointAngles cmd error'); return; end
Check if the robot has reached the starting position
while 1 [isOk,~, actuatorFb, ~] = gen3Kinova.SendRefreshFeedback(); show(gen3, ((actuatorFb.position)*pi/180)','Frames','off','PreservePlot',false); drawnow; if isOk if max(abs(wrapTo360(qs_deg(1,:))-actuatorFb.position)) < 0.1 disp('Starting point reached.') break; end else error('SendRefreshFeedback error') end end
Send Pre-Computed Trajectory
isOk = gen3Kinova.SendPreComputedTrajectory(qs_deg.', vel.', acc.', timestamp.', size(timestamp,1)); if isOk disp('SendPreComputedTrajectory success'); else disp('SendPreComputedTrajectory cmd error'); end
Check if the robot has reached the end position
status = 1; %% Check if the robot has reached the end position while status [isOk,~, actuatorFb, ~] = gen3Kinova.SendRefreshFeedback(); show(gen3, ((actuatorFb.position)*pi/180)','Frames','off','PreservePlot',false); drawnow; if isOk [~,status] = gen3Kinova.GetMovementStatus(); else error('SendRefreshFeedback error'); end end disp('Reached to Final waypoint.');
Disconnect from the Robot
Use this command to disconnect from Kinova Gen3 robot Robot.
isOk = gen3Kinova.DestroyRobotApisWrapper();
Clear Workspace.
clear;