Explore ROS 2 Topics: Publisher and Subscriber Guide
Nodes use individual communication pipelines, known as topics, to communicate with other nodes. Think of topic communication as a group phone call where anyone can speak, and everyone else on the call listens. This resembles a radio station broadcast where messages continuously transmit, and anyone tuned in hears them.
The data type used in topic communication is message. Topics are a key part of the ROS 2 publish/subscribe communication model. You can use topics for continuous data streams, like sensor data.
Publisher — Publishers are nodes which produce data. For instance,
Node 1can publish a specific type of message over a topic and make it available for other nodes, sayNode 2.Subscriber — Subscribers are nodes which consume data. For instance,
Node 2can subscribe to messages or information published on a topic.
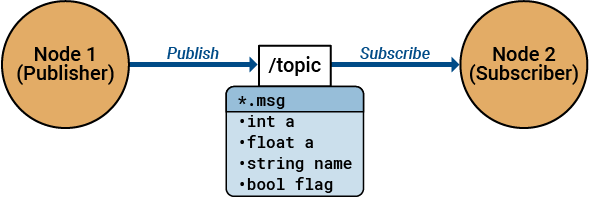
Message Interface
Nodes exchange data units known as messages. These messages are described in
.msg files and consists of two parts: fields
and constants. The fields value represents the
data sent within the message, while the constants value defines
useful values for interpreting those fields.
ROS 2 messages are structured data types and categorized into different types, based on their purpose. For example, a message designed to move a robot wheel differs from a message intended to capture an image from the robot's camera.
You can view the list of available message types by using ros2 msg
list
ros2 msg list
std_msgs/Bool std_msgs/Byte std_msgs/ByteMultiArray std_msgs/Char std_msgs/ColorRGBA std_msgs/Empty std_msgs/Float32 std_msgs/Float32MultiArray std_msgs/Float64 std_msgs/Float64MultiArray std_msgs/Header std_msgs/Int16 std_msgs/Int16MultiArray std_msgs/Int32...
This list contains message types of predefined message interface definitions.
You can create a message of any of these predefined types such as
example_interfaces/Int32.
firstMsg = ros2message("example_interfaces/Int32")firstMsg = struct with fields:
MessageType: 'example_interfaces/Int32'
data: 0
The firstMsg message contains various attached
fields, one of which is the data field. You
can set the data field to a supported value of your choice, which is
the constant attached to it. The code below sets the
data field to a constant - integer value
5.
firstMsg.data = int32(5)
firstMsg = struct with fields:
MessageType: 'example_interfaces/Int32'
data: 5
You can also create messages with field set to different
constants, with specific data types such as
string, float, and bool as
shown in these examples respectively.
secondMsg = ros2message("example_interfaces/String"); secondMsg.data = "Hello World!"
secondMsg = struct with fields:
MessageType: 'example_interfaces/String'
data: "Hello World!"
thirdMsg = ros2message("example_interfaces/Float32");
thirdMsg.data = 10.05thirdMsg = struct with fields:
MessageType: 'example_interfaces/Float32'
data: 10.0500
fourthMsg = ros2message("example_interfaces/Bool");
fourthMsg.data = truefourthMsg = struct with fields:
MessageType: 'example_interfaces/Bool'
data: 1
For more information on various ways to create, inspect, and populate ROS 2 messages in MATLAB that are commonly encountered in robotics applications, see Work with Basic ROS 2 Messages.
Publish Message to Topic and Subscribe to that Message
This example walks you through the process of creating a battery level monitoring system for a robot using ROS 2 topics in MATLAB®. By leveraging ROS 2 topics, nodes can publish and subscribe to battery level data, enabling real-time monitoring and decision making based on the battery status.
To begin with, create a ROS 2 node named /robot_battery_monitor.
This node is the central entity in the ROS 2 network, that manages communication for the
battery monitoring system by handling the publishing and subscribing of battery level
data.
node = ros2node('/robot_battery_monitor');Next, create a publisher that acts as a broadcaster and publishes battery level data
to the /battery_level topic. The battery level is a whole number
percentage (0-100).
Choose the std_msgs/Int32 message type from the list of predefined
messages because it supports whole number or integer data.
batteryLevelPub = ros2publisher(node, "/battery_level", "std_msgs/Int32")
batteryLevelPub =
ros2publisher with properties:
TopicName: '/battery_level'
MessageType: 'std_msgs/Int32'
NodeName: '/robot_battery_monitor'
History: 'keeplast'
Depth: 10
Reliability: 'reliable'
Durability: 'volatile'
Deadline: Inf
Lifespan: Inf
Liveliness: 'automatic'
LeaseDuration: InfDefine a callback function named batteryLevelCallback that
processes incoming battery level messages. This function prints the battery level and
takes action based on the battery status, such as stopping the robot or sending it back
to the recharge station. The callback function executes each time the subscribed topic
receives a new message.
function batteryLevelCallback(msg) batteryLevel = msg.data; % Ensure the data is of type int32 fprintf('Battery Level: %d%%\n', batteryLevel); if batteryLevel <= 0 fprintf('Battery depleted. Robot stopping...\n'); elseif batteryLevel <= 20 fprintf('Battery depleting. Send back to recharge station...\n'); else fprintf('Battery sufficient for operation.\n'); end end
Create a subscriber that listens to the /battery_level topic and
calls the batteryLevelCallback function when a new message is
received. This allows the system to react promptly to changes in battery level.
batteryLevelSub = ros2subscriber(node, "/battery_level", "std_msgs/Int32", @batteryLevelCallback)
batteryLevelSub =
ros2subscriber with properties:
TopicName: '/battery_level'
LatestMessage: []
MessageType: 'std_msgs/Int32'
NodeName: '/robot_battery_monitor'
NewMessageFcn: @batteryLevelCallback
History: 'keeplast'
Depth: 10
Reliability: 'reliable'
Durability: 'volatile'
Deadline: Inf
Lifespan: Inf
Liveliness: 'automatic'
LeaseDuration: Inf
Simulate the publishing of battery levels by creating a loop that decreases the
battery level from 100% to 0% in steps of 10%. For each battery level, create a message,
set the data, and publish it to the /battery_level topic.
for batteryLevel = 100:-10:0 % Create a message msg = ros2message(batteryLevelPub); msg.data = int32(batteryLevel); % Publish the message send(batteryLevelPub, msg); % Pause to simulate time passing pause(1); end
Battery Level: 100% Battery sufficient for operation. Battery Level: 90% Battery sufficient for operation. Battery Level: 80% Battery sufficient for operation. Battery Level: 70% Battery sufficient for operation. Battery Level: 60% Battery sufficient for operation. Battery Level: 50% Battery sufficient for operation. Battery Level: 40% Battery sufficient for operation. Battery Level: 30% Battery sufficient for operation. Battery Level: 20% Battery depleting. Send back to recharge station... Battery Level: 10% Battery depleting. Send back to recharge station... Battery Level: 0% Battery depleted. Robot stopping...
Custom Message Support for ROS 2 Topics
Utilizing predefined interface definitions is generally considered a best practice. However, there are situations where the standard message types may not align with the specific requirements of your robotic application. For instance, if you require a message format for managing inventory that includes fields for item name, quantity, and storage location, you need to create custom ROS 2 messages. ROS Toolbox supports ROS 2 custom message generation which is elaborated in ROS 2 Custom Message Support.
You can generate ROS 2 custom messages by reading ROS 2 custom message definitions in
the specified folder path by using ros2genmsg.
The function folder must contain one or more ROS 2 packages. These packages contain the
message definitions in .msg files. You can also create a shareable
ZIP archive of the generated custom messages and use this ZIP archive to register the
custom messages in another machine by using ros2RegisterMessages.
In MATLAB, you do not typically write .msg files directly.
Instead, you create custom messages using ROS 2 package tools and then use them in
MATLAB.
See Also
ros2message | ros2publisher | ros2subscriber
Topics
- Work with Basic ROS 2 Messages
- Exchange Data with ROS 2 Publishers and Subscribers
- Create Custom Messages from ROS 2 Package