Mapping and Localization
ROS Toolbox enables you to design and deploy standalone applications for mapping and localization for autonomous systems over a ROS or ROS 2 network. You can either fetch sensor data from a simulated robot over the ROS network or use a recorded ROS bag data to build a map of the robot's environment using simultaneous localization and mapping (SLAM).
SLAM uses localization, mapping and pose estimation algorithms with either camera or lidar data to simultaneously build a map of the robot's environment, and localize the robot in that environment at the same time.
Featured Examples
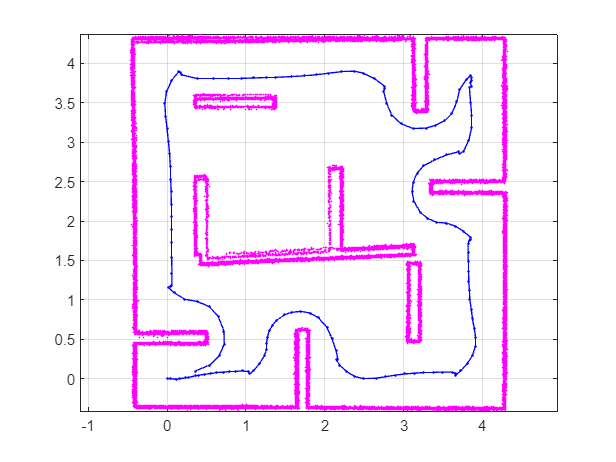
Build a Map Using Lidar SLAM with ROS in MATLAB
Use 2-D lidar data from a simulated robot in Gazebo to build a map.
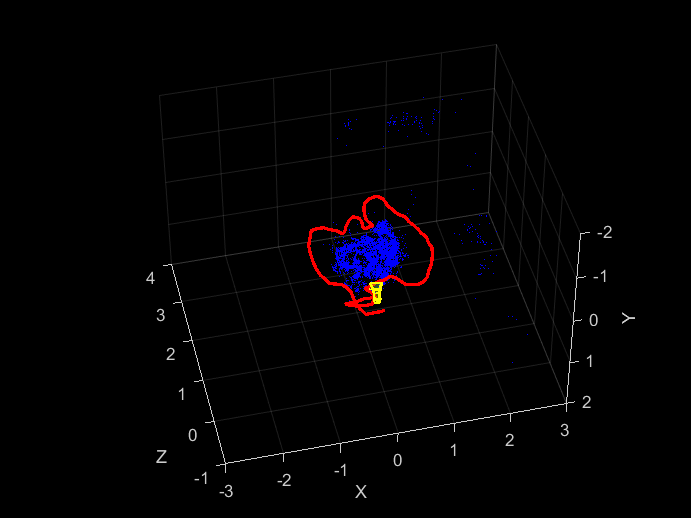
Build and Deploy Visual SLAM Algorithm with ROS in MATLAB
In this example, you implement a visual simultaneous localization and mapping (SLAM) algorithm to estimate the camera poses for the TUM RGB-D Benchmark [1] dataset. You then generate C++ code for the visual SLAM algorithm and deploy it as a ROS node to a remote device using MATLAB®.
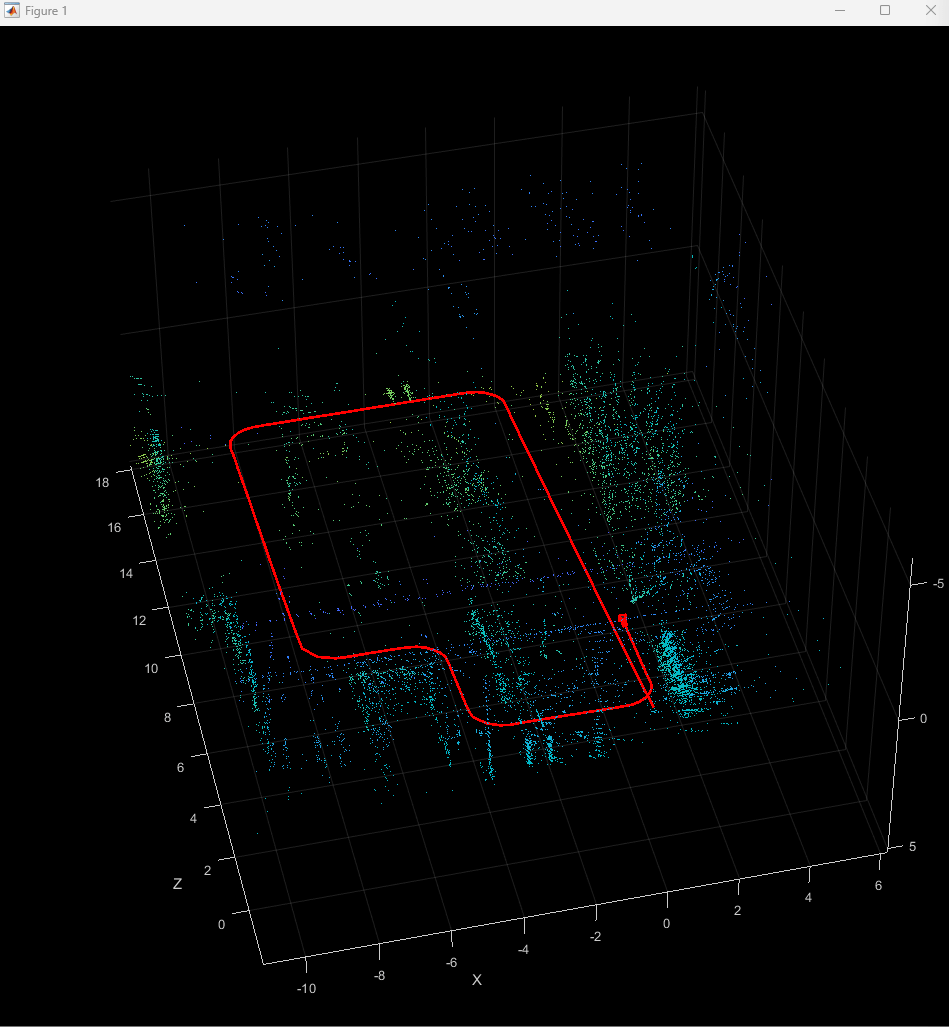
Simulate RGB-D Visual SLAM System with Cosimulation in Gazebo and Simulink
Simulates an RGB-D visual simultaneous localization and mapping (SLAM) system to estimate the camera poses using data from a mobile robot in Gazebo.