Monitor Action Goal
Libraries:
ROS Toolbox /
ROS 2
Description
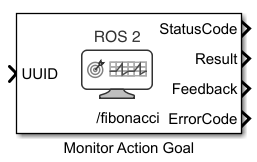
The Monitor Action Goal block enables you to monitor the status, feedback and result of an active
action goal in a ROS 2 network. This block accepts the UUID input as a Simulink non-virtual
bus of unique_identifier_msgs/UUID message type.
To use this block, you must have a paired Send Action Goal block of a matching action name and type. Selections made in the Send Action Goal block are automatically synchronized with the Monitor Action Goal block.
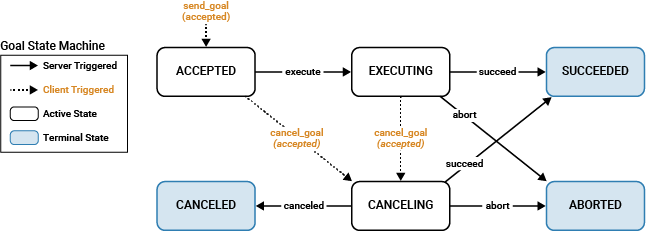
You can use this block to monitor these states of the action goal after it is accepted by an action server.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2024a