ROS Write Image, ROS 2 Write Image
Libraries:
ROS Toolbox /
ROS
ROS Toolbox /
ROS 2
Description
Examples
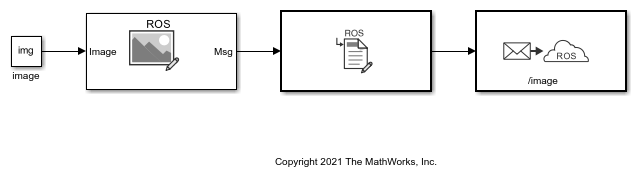
Write a ROS Image Message in Simulink
Write a image message and publish it to a ROS network in Simulink®.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2022a