Publish and Subscribe to ROS Messages in Simulink
This model shows how to publish and subscribe to a ROS topic using Simulink®.
open_system('rosPubSubExample.slx')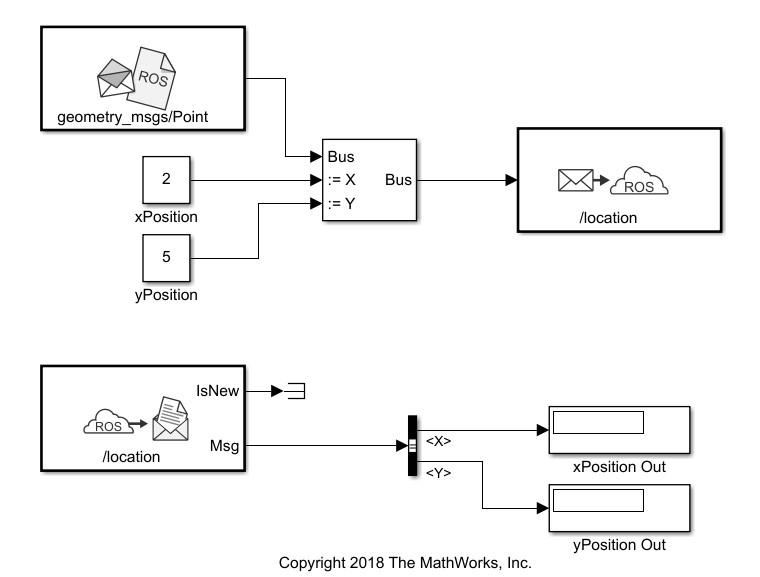
Use the Blank Message and Bus Assignment blocks to specify the X and Y values of a 'geometry_msgs/Point' message type. Open the Blank Message block mask to specify the message type. Open the Bus Assignment block mask to select the signals you want to assign. Remove any values with '???' from the right column. Supply the Bus Assignment block with relevant values for X and Y.
Feed the Bus output to the Publish block. Open the block mask and choose Specify your own as the topic source. Specify the topic, '/location', and message type, 'geoemetry_msgs/Point'.
Add a Subscribe block and specify the topic and message type. Feed the output Msg to a Bus Selector and specify the selected signals in the block mask. Display the X and Y values.
Before running the model, call rosinit to connect to a ROS network.
rosinit
Launching ROS Core... Status before launching ros core :0 result before launching ros core: 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157968 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 157970 pts/2 S+ 0:00 grep -E ros|python Done in 0.98913 seconds. * Inside getProcessPID function * Process Name: /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 Status before getting PID :0 Result before getting PID : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 157993 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 157995 pts/2 S+ 0:00 grep -E ros|python Result: 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 Status: 0 PID obtained: 157973 Status after getting PID :0 Result after getting PID : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158000 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158002 pts/2 S+ 0:00 grep -E ros|python * Exiting getProcessPID function * Status after launching ros core :0 result after launching ros core: 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158003 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158005 pts/2 S+ 0:00 grep -E ros|python Status before deleting node :0 Result before deleting node : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158006 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 842 -1 -mvmOutputPipe -1 848 158021 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158023 pts/2 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158026 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158028 pts/2 S+ 0:00 grep -E ros|python Initializing ROS master on http://172.20.14.210:56079. Initializing global node /matlab_global_node_18590 with NodeURI http://dcc542929glnxa64:42031/ and MasterURI http://localhost:56079.
Run the model. You should see the xPosition Out and yPosition Out displays show the corresponding values published to the ROS network.
sim('rosPubSubExample')Status before deleting node :0 Result before deleting node : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158029 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 751 -1 -mvmOutputPipe -1 758 158048 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 780 -1 -mvmOutputPipe -1 847 158091 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158093 pts/2 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158029 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 751 -1 -mvmOutputPipe -1 758 158097 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158099 pts/2 S+ 0:00 grep -E ros|python
Shut down the ROS network.
rosshutdown
Shutting down global node /matlab_global_node_18590 with NodeURI http://dcc542929glnxa64:42031/ and MasterURI http://localhost:56079. Status before deleting node :0 Result before deleting node : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158029 ? Sl 0:00 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/bin/glnxa64/libmwros1server -mvmInputPipe 751 -1 -mvmOutputPipe -1 758 158102 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158104 pts/2 S+ 0:00 grep -E ros|python Status after deleting node :0 Result after deleting node : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158108 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158110 pts/2 S+ 0:00 grep -E ros|python Shutting down ROS master on http://172.20.14.210:56079. Status before deleting core :0 Result before deleting core : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 157973 pts/2 S 0:00 bash /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/toolbox/ros/mlroscpp/util/+ros/+internal/runroscmd.sh /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1 /tmp/Bdoc25b_2988451_749950/tp11ab543d_455c_4cbb_87fb_beb5cdb1b79a/ros1/glnxa64/venv /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/bin/glnxa64 rosmaster --core -p 56079 -w 3 157985 pts/2 Sl 0:00 python3 /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab/sys/ros1/glnxa64/ros1/bin/rosmaster --core -p 56079 -w 3 158111 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158113 pts/2 S+ 0:00 grep -E ros|python * Inside killProcessByPID function * PID of core to be killed: 157973 Status after Child Process Killed: 0 Result after Child Process Killed: Status after deleting core :0 Result after deleting core : 874 ? Ssl 5:37 /usr/bin/python3 /usr/bin/mta-sts-daemon --config /etc/mta-sts-daemon.yml 1471 ? Ssl 0:00 /usr/bin/python3 /usr/share/unattended-upgrades/unattended-upgrade-shutdown --wait-for-signal 156088 ? Ss 0:00 /bin/sh /usr/bin/xvfb-run -a -s -screen 0 1280x1024x24 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156118 ? S 0:00 /bin/sh -c export TMPDIR=/tmp/Bdoc25b_2988451_749950 COMPONENT=examples/ros ; cd /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/matlab/examples/ros ; //mathworks/hub/bat/common/bin/mw sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156125 ? S 0:00 sh ../../tools/build_using_mlpath/mlenv --use-scoped-paths 1 --scoped-cppms-file /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d/scoped_cppms_modules.txt --scoped-cppms-envvar MW_SCOPED_CPPMICROSERVICES_MODULES --tag bml --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --paths /mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MATLAB_LOG_DIR=/mathworks/devel/bat/Bdoc25b/logs/2988451/build.glnxa64.2988451.r001/examples/ros/build.glnxa64.2988451.r001.bml.3a052e20328e9e9ac3a759de8d845d6d MAKEFLAGS= DISPLAY=:0 MESA_BACK_BUFFER=Pixmap perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 156182 ? S 0:00 perl ../../tools/build_using_matlab/mlrun --verbose --runnable /mathworks/devel/bat/filer/batfs2566-0/Bdoc25b.2988451/build/runnable/matlab --display mwtools.liveCodeToDocbook ../../derived/glnxa64/examples/ros/mlx_to_docbook5.txt ../../derived/glnxa64/examples/ros examples/ros ../../help/examples/ros/glnxa64 //mathworks/hub/3rdparty/R2021a/6299939/glnxa64/pngquant 1 158118 pts/2 S+ 0:00 /bin/bash -c ps ax | grep -E 'ros|python' 158120 pts/2 S+ 0:00 grep -E ros|python * Exiting killProcessByPID function *