Simulink Summary Table
表中指定的 Simulink 模型、系统、模块或信号的属性或参数
描述
该组件在表中显示所选 Simulink® 模型、系统、模块或信号的属性或参数。
对象类型
选择在生成的报告中显示的对象类型。
模块(默认)
模型
系统
信号
注解
所选的对象类型会影响属性列窗格中可用的选项。
属性
指定有关表的信息。
表标题:指定生成报告中的表标题。
自动(默认):使用自动生成的标题。
自定义:指定自定义标题。
属性列
此窗格显示要包含在生成的报告的摘要表中的对象属性。
要添加属性:
在左侧的文本框中选择适当的属性级别。
在右侧的文本框中,选择要添加的属性,然后点击添加。
要删除属性,请选择属性名称并点击删除。
Parent 属性列仅显示父系统的名称。要显示父系统的完整路径,请将属性指定为 parent 并使用小写的 p。
%<SplitDialogParameters> 是 Simulink 摘要表的独特属性,其中对象类型是 Block。此属性生成多个按模块类型组织的摘要表。每个摘要表组包含该模块的对话框参数。
可用属性列表中的某些条目(例如 Depth)是“虚拟”属性,您无法使用 get_param 命令访问。模块和系统循环组件中用于属性/值过滤的属性必须能够被 get_param 检索。因此,您无法配置摘要表来报告所有 Depth == 2 的模块。
您可以为 Simulink 摘要表中的属性创建多个值。例如,要报告类型为 Inport、Outport 和 Constant 的模块:
选中搜索 Simulink 属性名称/属性值对组框。
确保将属性名称设置为 BlockType。
在属性值字段中输入以下文本:
\<(Inport|Outport|Constant)\>
删除空列:从表中删除空列。
转置表:将摘要表的行更改为生成的报告中的列,将属性名称放在第一列,将值放在其他列。
对象行
为每行插入锚点:为摘要表中的每一行插入一个锚点。
报告内容:
基于上下文自动生成列表:报告当前上下文中的所有模块,由父组件设置。
自定义 - 使用模块列表:报告指定模块的列表。指定每个模块的完整路径。
循环选项
对模块排序
按模块名称字母顺序:按名称的字母顺序对模块进行排序。
按系统名称字母顺序:按名称的字母顺序对系统进行排序。列出每个系统中的模块,但没有特定的顺序。
按完整 Simulink 路径字母顺序:按 Simulink 路径的字母顺序对模块进行排序。
按模块类型:根据模块类型的字母顺序对模块进行排序。
按模块深度:按模块在模型中的深度对模块进行排序。
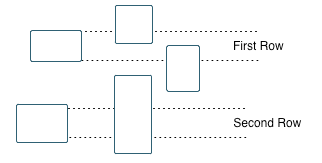
按布局(从左到右):按模块在模型布局中的位置(按行)对模块进行排序。位于模型左上角最远处的模块是该行的锚点。该行包含所有与锚点模块的上下边缘定义的水平区域重叠的其他模块。其他行使用相同的算法,使用最接近模型左上角的下一个未报告的模块作为锚点。
按布局(从上到下):按模块在模型布局中的位置(按列)对模块进行排序。位于模型左上角最远处的模块是该列的锚点。该列包含所有与锚点模块的左右边缘定义的垂直区域重叠的其他模块。其他列使用相同的算法,使用最接近模型左上角的下一个未报告的模块作为锚点。
按遍历顺序:按遍历顺序对模块进行排序。
按仿真顺序:按执行顺序对模块进行排序。
%<VariableName>:插入 MATLAB® 工作区中的变量值。
%<>符号可以表示字符串或元胞数组。有关详细信息,请参阅文本组件引用页面上的 %<VariableName> 符号。
搜索 Simulink 属性名称/属性值对组:仅报告具有指定属性名称-值参量的 Simulink 模块。要启用搜索,请点击复选框。在属性名称和属性值表的第一行中,点击编辑框内部,删除现有文本,然后键入属性名称和值。
要查找模块的属性名称,请使用
get_param函数或在模型中选择一个模块,然后在 MATLAB 命令行中输入此代码:get(gcbh)
示例
指定以下选项以在模型 f14 的报告中生成摘要表:
按系统深度对系统进行排序。
将系统参数
Name和Block包含在表中。
报告中出现下表。
名称 | 模块 |
|---|---|
f14 | u, Actuator Model, Aircraft Dynamics Model, Angle of Attack, Controller, Dryden Wind Gust Models, Gain, Gain1, Gain2, Gain5, More Info, More Info1, Nz pilot calculation, Pilot, Pilot G force Scope, Stick Input, Sum, Sum1, alpha (rad), Nz Pilot (g) |
Aircraft Dynamics Model | Elevator Deflection d (deg), Vertical Gust wGust (ft/sec), Rotary Gust qGust (rad/sec), Gain3, Gain4, Gain5, Gain6, Sum1, Sum2, Transfer Fcn.1, Transfer Fcn.2, Vertical Velocity w (ft/s), Pitch Rate q (rad/s) |
Controller | Stick Input (in), alpha (rad), q (rad/s), Alpha-sensor Low-pass Filter, Gain, Gain2, Gain3, Pitch Rate Lead Filter, Proportional plus integral compensator, Stick Prefilter, Sum, Sum1, Sum2, Elevator Command (deg) |
Dryden Wind Gust Models | Band-Limited White Noise, Q-gust model, W-gust model, Wg, Qg |
More Info | None |
More Info1 | None |
Nz pilot calculation | w, q, Constant, Derivative, Derivative1, Gain1, Gain2, Product, Sum1, Pilot g force (g) |
是否在报告中插入内容?
是。表。
类
rptgen_sl.csl_summ_table