gnssSignalTracker
Description
The gnssSignalTracker
System object™ tracks the phase, frequency, and delay offsets of a global navigation satellite
system (GNSS) signal. This object uses a phase locked loop (PLL), frequency locked loop (FLL),
and delay locked loop (DLL) to track phase, frequency, and code phase, respectively, in the
incoming signal. The object supports tracking these GNSS signals.
To track the phase, frequency, and delay offsets of a GNSS signal:
Create the
gnssSignalTrackerobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Description
gst = gnssSignalTracker
gst = gnssSignalTracker(Name,Value)gnssSignalTracker(GNSSSignalType="QZSS
C/A") sets the type of GNSS signal to "QZSS C/A".
Properties
Usage
Description
[
tracks the phase, frequency, and delay in the input waveform trackedWave,trackInfo] = gst(signal)signal,
and returns the integrated version of the signal trackedWave, after
correcting the respective phase, frequency, and delay errors.
trackInfo is returned as a structure which contains tracking
information of the phase, frequency, and delay of the integrated output signal.
This object implements the tracking algorithms specified in [6].
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Generate a waveform from four GPS satellites without any impairments, and track the signal.
Initialize the configuration parameters.
numsat = 4;
PRNIDs = [7; 11; 20; 28];
fs = 5e6; % In samples/sec Initialize the GPS waveform generator object.
gpswaveobj = gpsWaveformGenerator(SampleRate=fs,PRNID=PRNIDs,EnablePCode=true)
gpswaveobj =
gpsWaveformGenerator with properties:
SignalType: "legacy"
PRNID: [4×1 double]
EnablePCode: true
HasDataWithPCode: true
HasDataWithCACode: true
InitialTime: 0
SampleRate: 5000000
Show all properties
Generate random data for 20 bits.
numbits = 20; % Generate waveform for 20 bits
numCACodeBlocksPerBit = 20;
data = randi([0 1],numbits,numsat);
numsteps = numbits*numCACodeBlocksPerBit; Create the tracking object and set its properties.
gst = gnssSignalTracker(PRNID=PRNIDs, ... SampleRate=fs); trsig = zeros(numsteps,numsat); fqyerr = trsig; % Initialize frequency offset error fqyest = trsig; % Initialize frequency offset estimate delerr = trsig; % Initialize delay error delest = trsig; % Initialize delay estimate pherr = trsig; % Initialize phase error phest = trsig; % Initialize phase estimate
Generate the waveform in a loop and track it.
for ibit = 1:numbits % Generate waveform iqsig = gpswaveobj(data(ibit,:)); waveform = sum(iqsig,2); % Track generated waveform idx = (ibit-1)*numCACodeBlocksPerBit + (1:numCACodeBlocksPerBit); [trsig(idx,:),trinfo] = gst(waveform); fqyerr(idx,:) = trinfo.FrequencyError; fqyest(idx,:) = trinfo.FrequencyEstimate; delerr(idx,:) = trinfo.DelayError; delest(idx,:) = trinfo.DelayEstimate; pherr(idx,:) = trinfo.PhaseError; phest(idx,:) = trinfo.PhaseEstimate; end
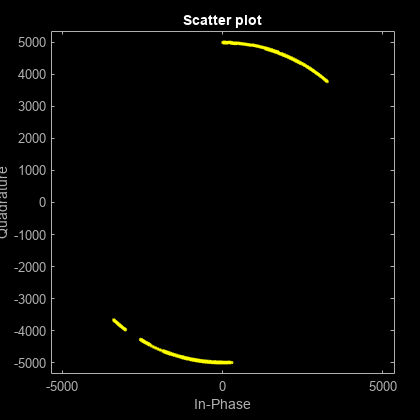
Plot the constellation of the tracking output. While the loops are converging, frequency offset varies in the signal. You can observe this in the phase offset in the plot.
scatterplot(trsig(:))
Acquire and track a GPS L5 waveform at a sampling rate of 15 MHz.
Load a precomputed GPS waveform.
load gnssWaveformsCreate and initialize the GNSS acquirer object.
fs = 15e6; % Sample rate gsa = gnssSignalAcquirer(GNSSSignalType="GPS L5I", ... SampleRate=fs);
Search for 32 GPS satellite PRN IDs, and display the frequency offset, code-phase offset, and the detection status of a satellite for each PRN ID.
acqtable = gsa(gpsL5BBWaveform,1:32)
acqtable=32×4 table
PRNID FrequencyOffset CodePhaseOffset IsDetected
_____ _______________ _______________ __________
27 7500 4092 true
30 9000 5115 true
10 5500 1023 true
23 1000 3069 true
17 3500 2046 true
26 -7000 6588.8 false
5 3000 1765.7 false
2 -4000 7049.2 false
9 6500 1867.3 false
32 -5500 3867.6 false
28 0 9366.6 false
21 -7000 3015.8 false
4 10000 3051.3 false
31 6000 8055.1 false
1 1500 1449.9 false
8 10000 10031 false
⋮
Create and initialize the GNSS tracker object.
gst = gnssSignalTracker(GNSSSignalType="GPS L5I", ... SampleRate=fs,PRNID=acqtable.PRNID(acqtable.IsDetected), ... InitialCodePhaseOffset=acqtable.CodePhaseOffset(acqtable.IsDetected), ... InitialFrequencyOffset=acqtable.FrequencyOffset(acqtable.IsDetected))
gst =
gnssSignalTracker with properties:
GNSSSignalType: "GPS L5I"
SampleRate: 15000000
IntermediateFrequency: 0
Show all properties
Track the GPS L5 waveform.
[trout,trinfo] = gst(gpsL5BBWaveform)
trout = 2×5 complex
102 ×
-1.2006 - 0.6198i 0.4554 + 0.2433i 0.3153 - 0.1598i 0.4878 + 0.8588i 0.1919 - 0.1475i
8.1327 + 5.3256i -0.3271 - 9.5949i 6.4623 + 6.1816i 0.2847 - 8.7228i 0.9945 + 8.3864i
trinfo = struct with fields:
PhaseError: [2×5 double]
PhaseEstimate: [2×5 double]
FrequencyError: [2×5 double]
FrequencyEstimate: [2×5 double]
DelayError: [2×5 double]
DelayEstimate: [2×5 double]
References
[1] IS-GPS-200, Rev:N. "NAVSTAR GPS Space Segment/Navigation User Segment Interfaces." GPS Enterprise Space & Missile Systems Center (SMC) - LAAFB, Aug 22, 2022.
[2] IS-GPS-800, Rev:J. "NAVSTAR GPS Space Segment/User Segment L1C Interfaces." GPS Enterprise Space & Missile Systems Center (SMC) - LAAFB, Aug 22, 2022.
[3] ISRO-IRNSS-ICD-SPS-1.1. "Signal in Space ICD for Standard Positioning Service." ISRO satellite navigation programme. August 2017.
[4] IS-QZSS-PNT-004. "Quasi-Zenith Satellite System. Interface Specification. Satellite Positioning, Navigation and Timing Service." Cabinet office, Government of Japan. January 25, 2021.
[5] IS-GPS-705, Rev:J. "NAVSTAR GPS Space Segment/User segment L5 Interfaces." Aug 22, 2022.
[6] Kaplan, Elliott D., and C. Hegarty, eds. Understanding GPS/GNSS: Principles and Applications. Third edition. GNSS Technology and Applications Series. Boston; London: Artech House, 2017.