Rope Drum
Power transmission system with tightly wound rope around cylindrical drum

Libraries:
Simscape /
Driveline /
Couplings & Drives
Description
The Rope Drum block represents a power transmission system where a rope is tightly wound around a cylindrical drum at a sufficient tension level to prevent slipping. You can configure the rope so that the ends point in the same or opposite directions. You can set the direction that the ends move with the Rope windup type parameter:
If the rope ends point in the same direction, they translate in opposite directions.
If the rope ends point in opposite directions, they translate in the same direction.
The equations refer to rope ends A and B, as illustrated by the figure.
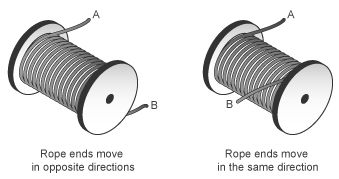
During normal operation, a driving torque causes the cylindrical drum to rotate about its axis of symmetry. The rotating drum transmits tensile force to the rope ends, which translate with respect to the drum centerline. The relative direction of translation between the two rope ends depends on the setting of the Rope windup type parameter. However, a positive drum rotation always corresponds to a positive translation at port A.
The block assumes that each rope end remains taut during simulation because slack rope ends do not transmit force. You can set the block to warn you if the rope loses tension.
You can optionally set parameters for:
Drum inertia
Viscous friction at the drum bearing
The block balances the torques and forces, such that
where:
T is the external torque acting on the drum. Due to torque balance, the external torque acting on the drum is the negative of the net torque applies by forces acting on the rope ends.
FA and FB are the external forces pulling on rope ends A and B.
R is the drum radius.
μ is the viscous friction coefficient at the drum bearings.
ω is the drum angular velocity.
δ is the rope windup type according to the parameter settings:
When you set Rope windup type to
Ends move in the same direction, δ = -1.When you set Rope windup type to
Ends move in the opposite directions, δ = +1.
The figure shows a crossed rope configuration and an open rope
configuration, which correspond to the Ends move in the same
direction and Ends move in the opposite
directions settings, respectively.
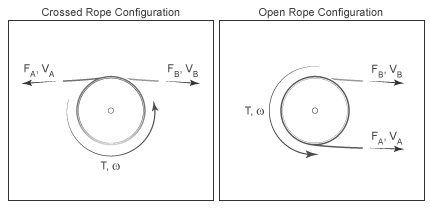
The translational velocities of the two rope ends are functions of the drum radius and angular velocity. Each translational velocity is equal to the tangential velocity of a point at the drum periphery according to the expressions
where:
VA is the translational velocity of rope end A.
VB is the translational velocity of rope end B.
Assumptions and Limitations
The block ignores slip at the rope-drum contact surface.
The block ignores rope compliance.
Examples
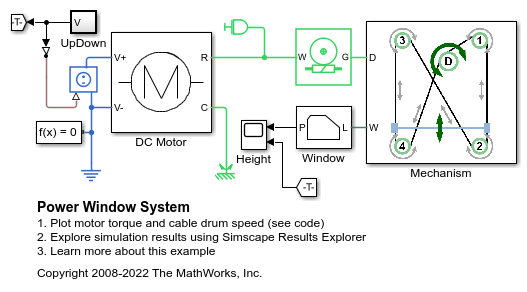
Power Window System
A motor-driven power window system. A DC motor drives the power window mechanism via a self-locking worm gear with the ratio 1 : 50. The power window mechanism consists of a cable drum and four pulleys all connected by a cable. The window is attached to the cable at two points by the lift plate. This ensures both sides of the window move at the same speed and in the same direction, keeping the window level. The model also includes viscous friction in the guide rails.