Manipulator with Unbalanced Load
This model shows a manipulator controlling the orientation of an end effector through an unbalanced arm. The motor is represented as a torque source using simple proportional control. The load on the end effector increases sharply when the end effector secures the load. Noise is introduced at each sensor to measure its effect on controller performance.
Model

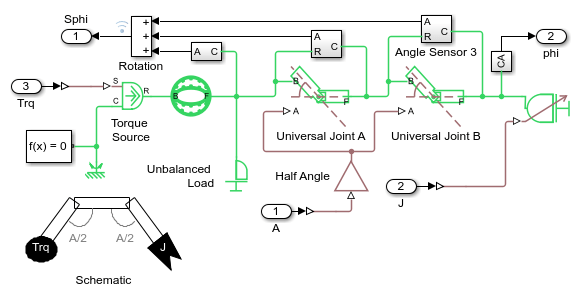
Manipulator Arm Subsystem
The manipulator arm consists of a harmonic drive, two universal joints assembled to form a double-Cardan joint, and a load. An ideal torque source rotates the arm. The controller needs to deal with varying angles in the double-Cardan joint, changes to the inertial load (Variable Inertia), and a shaft whose inertia varies with rotational angle (Unbalanced Load).
The control signal for the sensor is the sum of three sensors, each measuring the rotational angle of a portion of the arm.
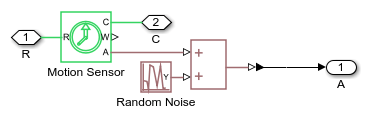
Angle Sensor 3 Subsystem
Random noise is added to each of the three sensors that provide the signal for the controller.
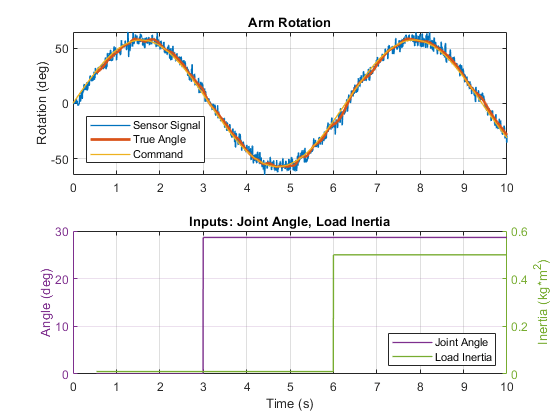
Simulation Results from Simscape Logging
The plot below shows the position of a rotating arm following a command signal. The system is exposed to two step disturbances: changes to the angles in a double-Cardan joint and the inertial load at the end of the arm. Additional challenges for the controller include a shaft that has an inertia that varies with angle and noise added to each sensor signal.