一般应用
这些示例结合常见工业应用,演示了 Simscape™ Driveline™ 的各种功能。
精选示例
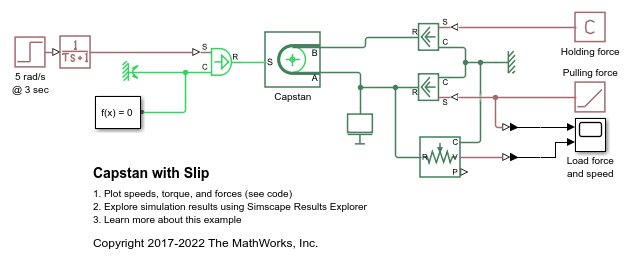
Capstan with Slip
A capstan represented by a Belt Pulley block from the Simscape™ Driveline™ library. A 100-N tension applied to belt end B holds a variable load at end A in place, even as the load increases. When the load force increases past the friction limit, the belt slips. Increasing the friction by using a higher friction coefficient or wrap angle allows the pulley to hold an even greater load force. This example also shows how suddenly turning the capstan, starting at 3 seconds, causes momentary slip, which is quickly recovered.
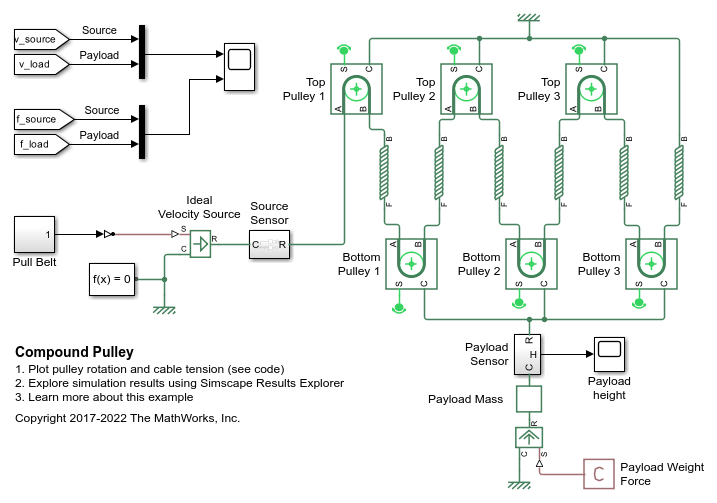
Compound Pulley
A block and tackle system that is represented by the Belt Pulley and Cable blocks from the Simscape™ Driveline™ library. This compound pulley is rigged as a threefold purchase with two triple blocks. The system has a mechanical advantage of 6.

Double Cardan Joint
Two methods to create a constant rotational velocity output using universal joints. In the first method, the angle of the universal joints is exactly opposite. The output shaft axis is parallel to the input shaft axis, but offset by some distance.
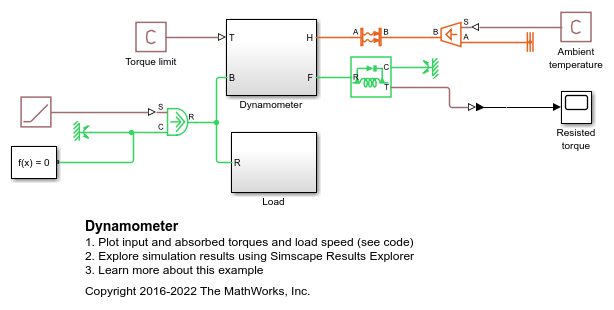
Dynamometer
This examples shows a dynamometer resisting a load from a prime mover. This prime mover is modeled as a torque source and could be an internal combustion engine, electric drive, or a hydraulic motor. The dyno absorbs input torque up to its limit, and allows rotation of connected loads for torques beyond. The dyno itself is modeled using the Fundamental Friction Clutch with static and dynamic limits set to the torque limit.
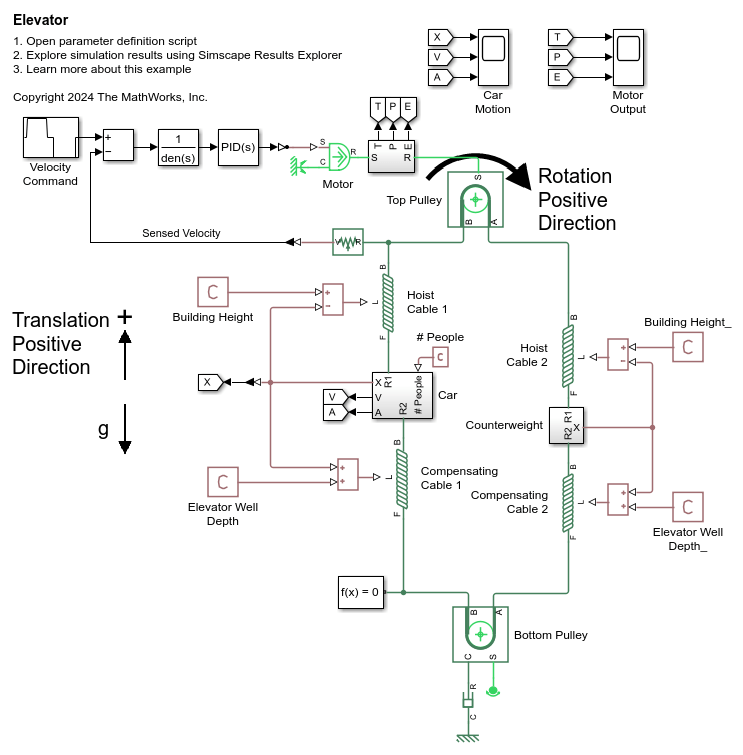
Elevator
Models an elevator system comprising a car with passengers, a counterweight, a hoist cable, and a compensating cable. The motor drives a top pulley. A PID controller senses the car's velocity and adjusts the motor torque to achieve the velocity command. In this scenario, the elevator starts at rest, moves upward at 1 m/s, stops, then moves downward at -1 m/s, and stops again. Sensors measure the car's height, velocity, and acceleration, as well as the motor's torque, power, and energy.
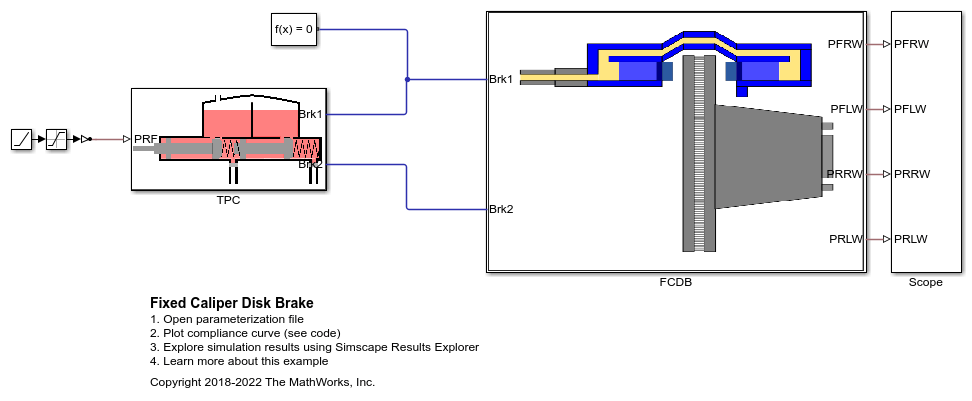
Fixed Caliper Disk Brake
Model, parameterize, and test a caliper disk brake. The example uses numerical data extracted from the tandem primary cylinder datasheet to identify an optimal design for the caliper disk brake. The example shows how to generate a compliance curve for the caliper disk brake.
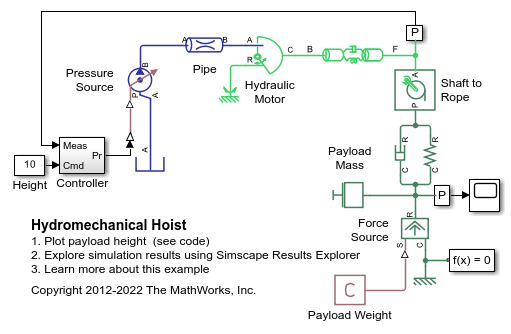
Hydromechanical Hoist
A hydromechanical hoist lifting a payload. An ideal hydraulic motor is driven by the pressure commanded by a controller. The controller estimates the current height of the payload by reading the angular velocity from the motor's flexible shaft. The rope is represented as a spring and damper, and the payload is modeled as a mass with gravitational force.

Manipulator with Unbalanced Load
A manipulator controlling the orientation of an end effector through an unbalanced arm. The motor is represented as a torque source using simple proportional control. The load on the end effector increases sharply when the end effector secures the load. Noise is introduced at each sensor to measure its effect on controller performance.
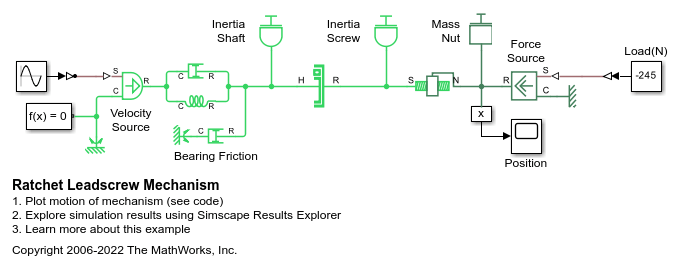
Ratchet Leadscrew Mechanism
A stepping mechanism constructed from a self-locking leadscrew and a unidirectional clutch. The input shaft of the unidirectional clutch oscillates with velocity amplitude 2 rad/s and frequency 0.5 rad/s. The unidirectional clutch drives the load via the leadscrew. The lead angle of the screw is small enough to ensure self-locking operation due to geometry and thread friction. As a result, the load maintains its position while the clutch input shaft rotates in the opposite direction and the load moves in incremental steps of about 25 mm.
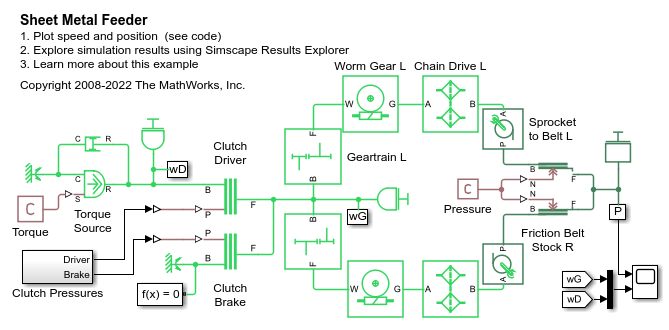
Sheet Metal Feeder
A feeding mechanism of a sheet metal cutter. Two slitted rolls are driven by a torque motor through two mechanical drivetrains. Each drivetrain consists of a spur gear train, worm gear, and a chain drive. The sprocket of the chain drive is connected to its respective slitted roll. The interaction between the rolls and the sheet metal is simulated by the Loaded Contact Translational Friction blocks.
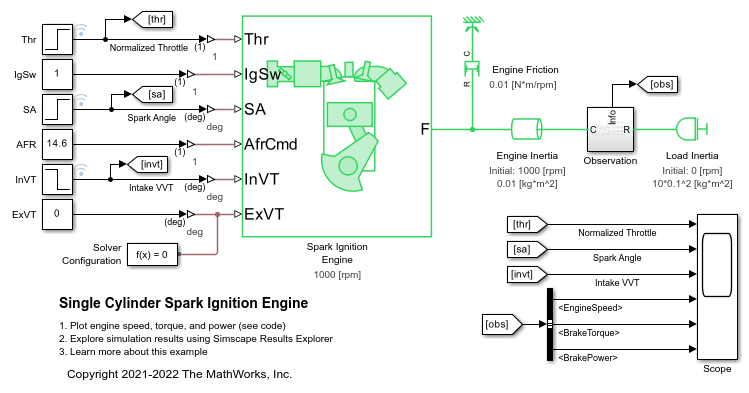
Single Cylinder Spark Ignition Engine
A crank-angle-resolved, naturally aspirated spark ignition engine. Control inputs such as throttle, intake VVT, air-to-fuel ratio, and spark advance vary during the simulation. You can simulate results from either an Otto cycle engine or an Atkinson cycle engine.
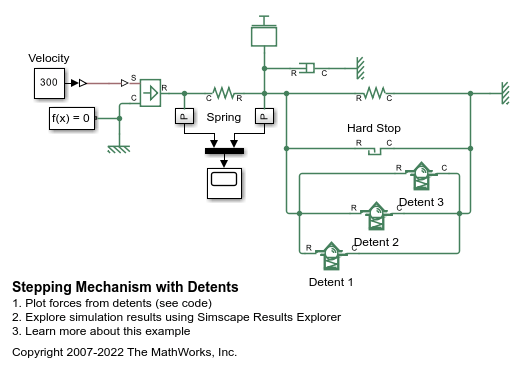
Stepping Mechanism with Detents
A mass moving along a slider and held at set points with translational detents. The mass is suspended between two springs and is subject to viscous friction. Three detents hold the load at 50, 75, and 125 mm. The peak force of these detents is 20, 30, and 20 N respectively. To move the load past each detent, the spring pushing the load must deform enough to produce a force that overcomes the holding force of the detents.
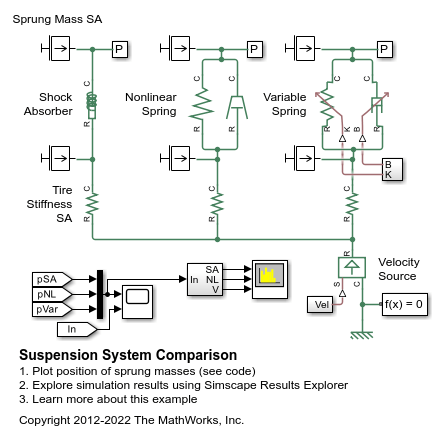
Suspension System Comparison
A testbed containing five suspensions, excited by the same oscillating velocity source. The sprung and unsprung masses in each suspension branch may represent a quarter of the vehicle mass and the tire mass, respectively, and the velocity source may correspond to an uneven road profile.
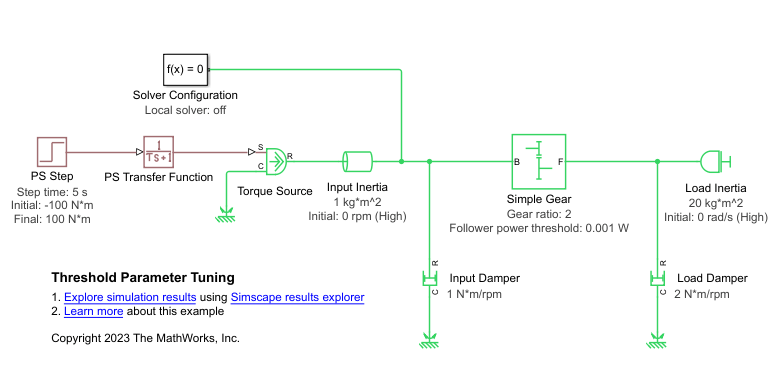
Threshold Parameter Tuning
Compare values for the Follower power threshold parameter in the Simple Gear block for a basic mechanical system. Blocks like the Simple Gear block use threshold parameters to smoothly transition a physical characteristic between zero and nonzero. Threshold parameters like the Follower power threshold parameter in the Simple Gear block are a numerical tool that you can use to aid the solver with transition and improve simulation performance. The appropriate value for this parameter depends on the system. You must determine it on a case by case basis by comparing simulation step sizes for a range of values, but the same advice applies to all threshold parameters.
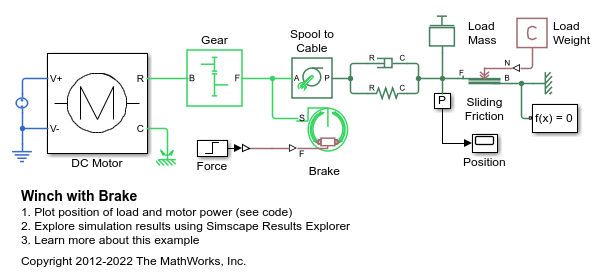
Winch with Brake
A winch driven by a DC motor and controlled with a double-shoe brake. The motor is connected to a 24 volt supply, and the shaft speed is stepped down with a 10:1 gear reduction. The pulled load is modeled as a mass with sliding friction. At a simulation time of six seconds, force is applied to an internal double-shoe brake, stopping the winch.

Wind Turbine
Model, parameterize, and test a wind turbine with a supervisory, pitch angle, MPPT (maximum power point tracking), and derating control. When you run the plot function, it generates a plot of the state transitions, normalized physical quantities such as the wind speed, wind turbine rotation speed, generator power, and pitch angle.
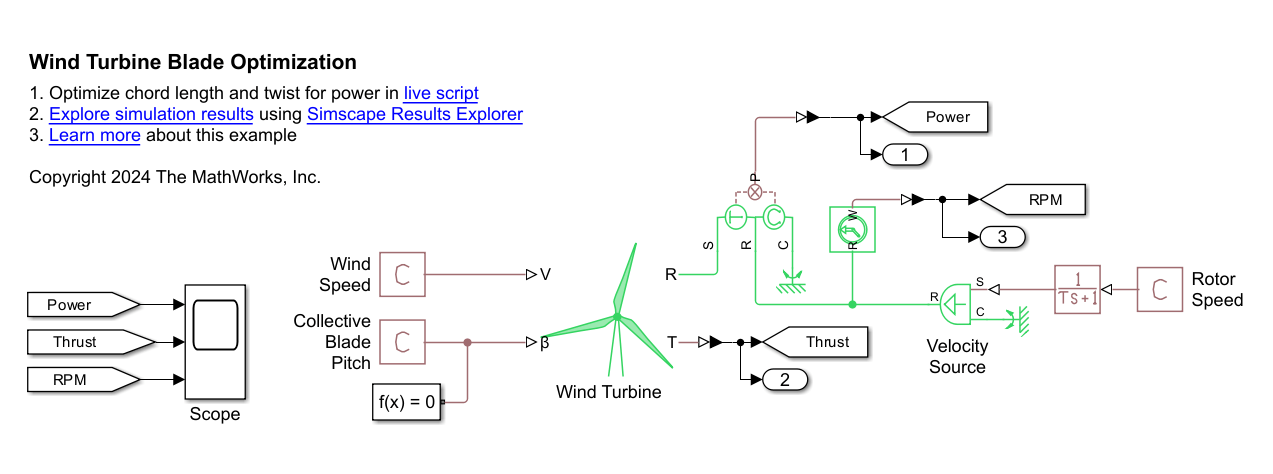
Wind Turbine Blade Optimization
Adjust the twist and chord length along a wind turbine blade to optimize the power output. It combines a Simscape™ Driveline™ test harness model with the fminsearch optimization function. The wind turbine model uses blade element momentum (BEM) theory, including wake rotation. By putting the test harness into Fast Restart, you can enable rapid optimization iterations. In this case, the optimization increases the power output from 4.3 MW to 5.9 MW. Other products available for performing this type of optimization with Simscape Driveline models include the Optimization Toolbox™ and Simulink® Design Optimization™. These products provide predefined functions to manipulate and analyze blocks using either GUIs or a command line approach.

Wind Turbine Driveline with Vibrations
A wind turbine rotor, controller, and flexible drive shaft with transverse vibrations. Click the button below to open the model.