Wind Turbine
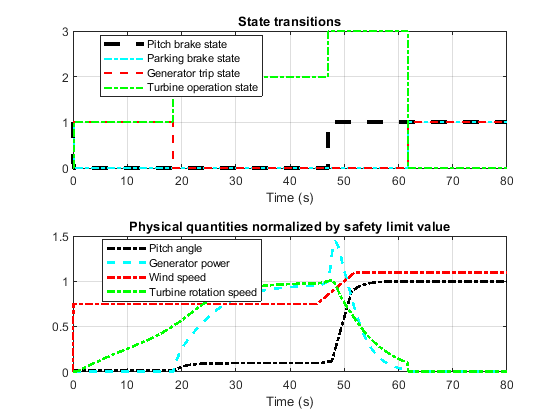
This example shows how to model, parameterize, and test a wind turbine with a supervisory, pitch angle, MPPT (maximum power point tracking), and derating control. When you run the plot function, it generates a plot of the state transitions, normalized physical quantities such as the wind speed, wind turbine rotation speed, generator power, and pitch angle.
Model
The following figure shows the model of a wind turbine. The mechanical and electrical domains each require their own Solver Configuration block.

Supervisory Control Subsystem
This subsystem demonstrates how to model the wind turbine state machine. The turbine state machine defines four wind turbine states.
Park brake mode: This is the entry mode of the wind turbine operation. The wind turbine enters the park brake mode from the pitch brake mode when the turbine rotor speed is under the permissible limits for safe operation. During this mode, the generator is in the tripped state, the hydraulic park brake is engaged, and the wind turbine rotor blades are pitched to the braking angle for the aerodynamic braking. The hydraulic brake is the secondary method for braking the wind turbine.
Startup mode: The wind turbine enters the startup mode from the park brake mode when the wind speed is under the permissible limits for safe operation. The wind turbine enters this mode from the pitch brake mode when the wind speed and the turbine speed are under the permissible limits. During this mode, the generator is in the tripped state, the hydraulic park brake is released, and the wind turbine rotor blades are pitched to the minimum angle for achieving the maximum turbine rotor acceleration.
Generating mode: The wind turbine enters the generating mode from the startup mode when the wind turbine rotor speed goes above the turbine cut in speed. During this mode, the generator is connected to the transformer, the hydraulic park brake is released, and the wind turbine rotor blades are pitched to achieve the optimal electric power generation as per the operating conditions.
Pitch brake mode: The wind turbine enters pitch brake mode from generating mode when the wind speed and turbine rotation speed are not under the permissible limits. The wind turbine enters the pitch brake mode from the startup mode when the wind speed is not under the permissible limits. During this mode, the generator is connected to the transformer to consume the kinetic energy available in the rotor blade, the hydraulic park brake is released, and the wind turbine rotor blades are pitched to the braking angle for the aerodynamic braking. The aerodynamic braking is the primary method for braking the wind turbine.

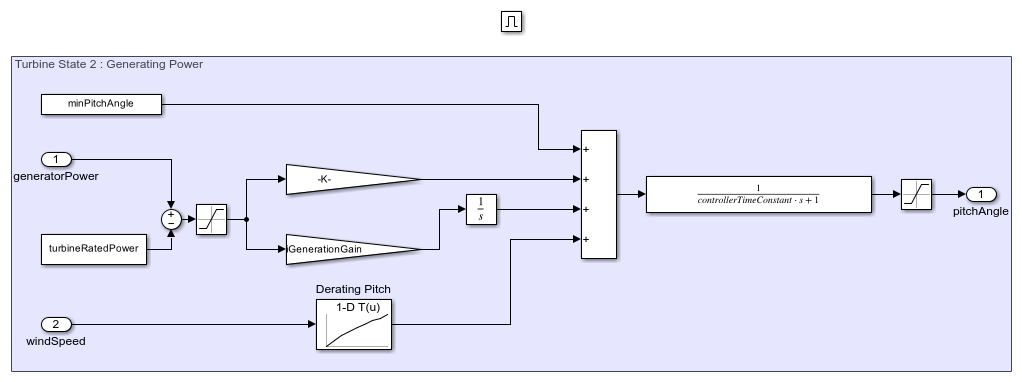
Pitch Controller Subsystem
This subsystem demonstrates how to model the pitch angle controller of the wind turbine.
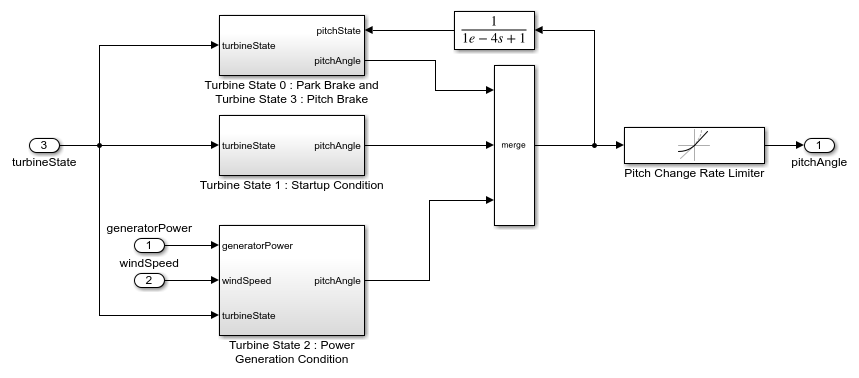
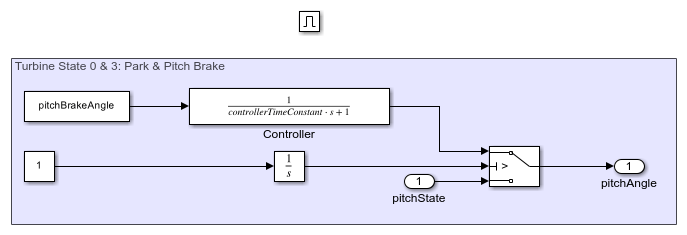
Park brake and pitch brake mode: The pitch angle is set to 95 degree for the aerodynamic braking during these modes.
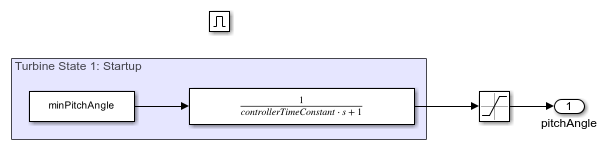
Startup mode: The pitch angle is set to 1 degree for achieving the maximum acceleration during this mode.
Generating mode: The pitch angle is set to achieve the optimal electric power generation as per the operating conditions.
1. The pitch angle remains at the lowest setting at 1 degree up to rated wind speed. This control acts in synchronization with the wind turbine's MPPT power control.
2. When the wind speed is above the rated wind speed, the pitch angle changes in synchronization with the wind turbine's derating power control.
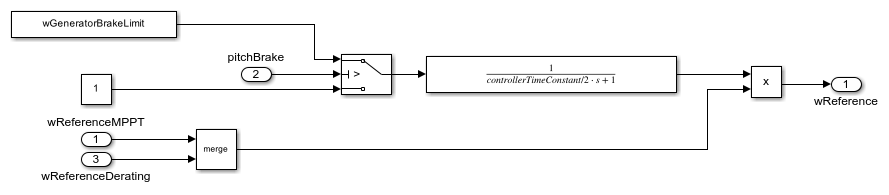
Power Controller Subsystem
This subsystem demonstrates how to model the power demand and the generator input speed reference for the optimal torque loading on the wind turbine through the generator.
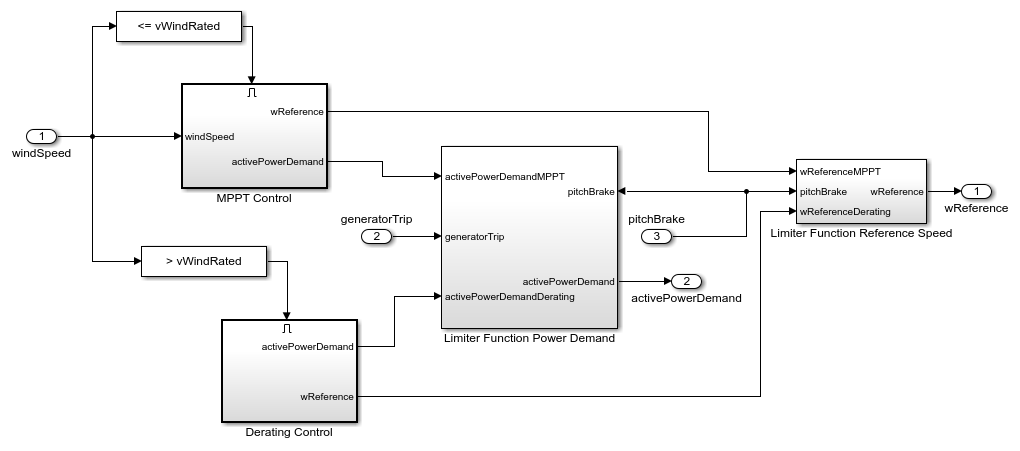
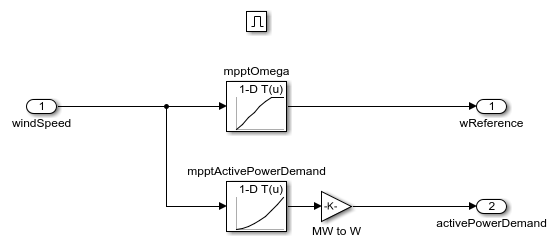
MPPT control: This mode is active up to the rated wind speed. The power demand and the generator reference speed is as per the wind turbine characteristic power performance curve.
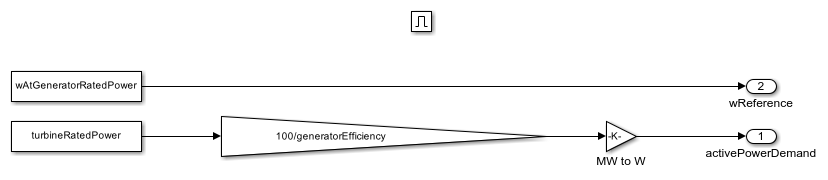
Derating control: This mode is active above the rated wind speed. The power demand and the generator reference speed is kept constant based on the rating of the wind turbine.
Limiter Function Power Demand: This function limits the power demand as per the wind turbine's mode of operation.
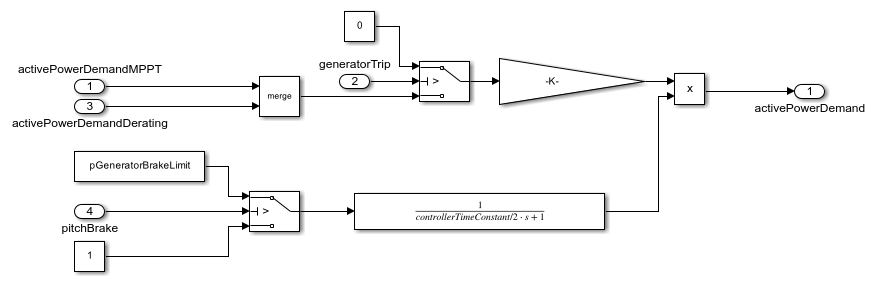
Limiter Function Reference Speed: This function limits the speed reference as per the wind turbine's mode of operation.
Wind Turbine Subsystem
This subsystem demonstrates how to model the wind turbine.
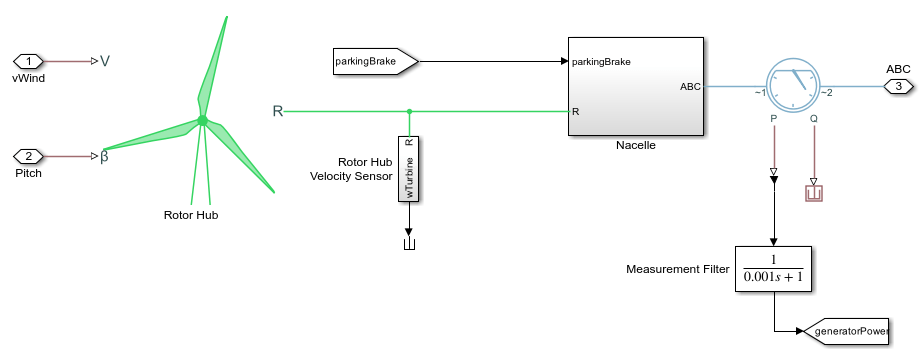
Rotor Hub: The rotor of a horizontal axis wind turbine is modeled using the Simscape™ Driveline™ Wind Turbine block. In this block, mechanical power extracted from the wind, P, is calculated as

where,
rho is the air density
Ar is the area swept by the rotor blades
vWind is the wind speed
cp is the power coefficient as a function of lambda and pitch.
lambda is the ratio of the rotor blade tip speed and the wind speed, it is also called Tip Speed Ratio (TSR)
pitch is the rotor blade pitch angle
Nacelle: This subsystem demonstrates how to model the nacelle components of a wind turbine.
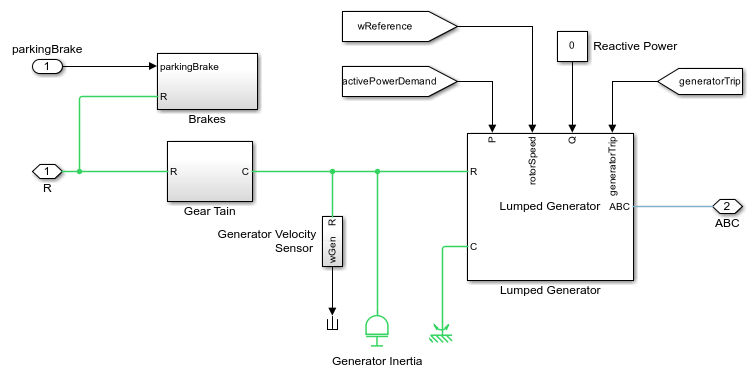
Brakes: This subsystem demonstrates how to model the brakes in the nacelle. The hydraulics brake is a secondary braking method in the wind turbine. The brakes are engaged either when the wind turbine speed goes below the parking brake speed while the wind turbine is under the park brake mode, or when the wind turbine is under maintenance operation. If they are applied above the parking brake speed, the brake can burn out or the nacelle can catch fire due to the excessive frictional heat generation.

Gear train: This subsystem demonstrates how to model the gear train in the nacelle. An epicyclic gear train represents the gear train system with the power losses. The gear train contributes to high power loss in the wind turbine operation.

Lumped generator: This subsystem demonstrates how to model the generator in the nacelle. This is a simplified model of a generator to increase the simulation speed.
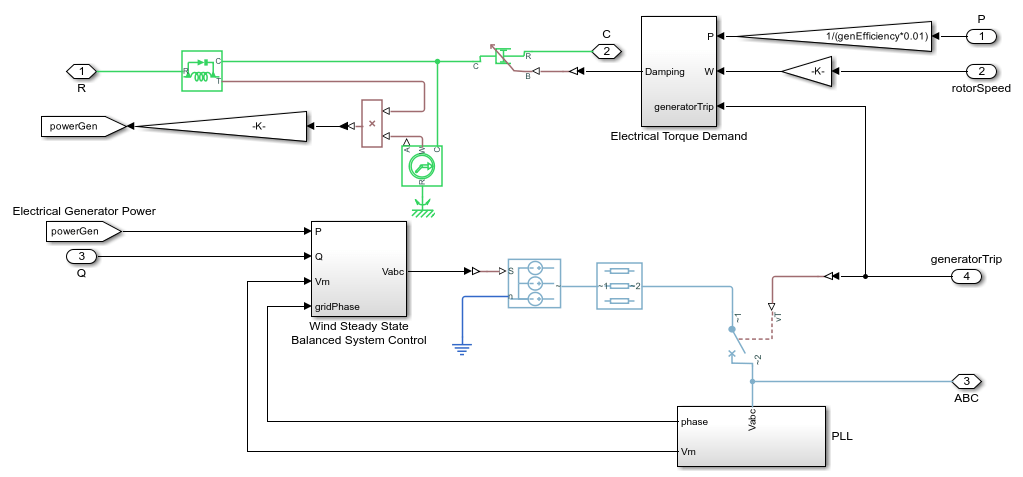
The wind turbine has a larger time constant and slower response than a traditional doubly-fed induction generator (DFIG) system. To simulate wind turbine control, you must run the simulation longer.
The closed-loop DFIG system is faster than wind turbine control systems such as pitch control. Therefore, a low fidelity lumped DFIG generator system is practical for improving simulation speed and providing flexibility. The lumped generator system integrates with the wind turbine system to simulate different aspects of the control algorithm.
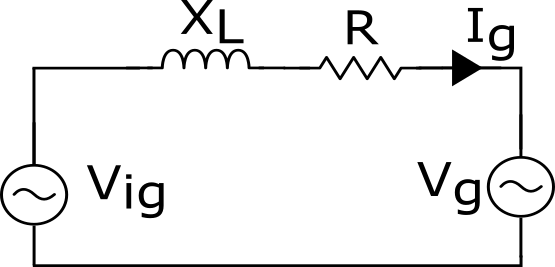
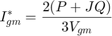
The lumped generator model tracks the grid voltage and phase angle at the point of common coupling (PCC) using the phase locked loops (PLL). To improve the simulation speed, fast acting PLL is modeled using the grid voltage zero crossing detection. Lumped generator uses the grid voltage and phase obtained from the PLL and implements the power flow equation with the generator lumped leakage inductance and resistance. The lumped generator model takes the real power (P), reactive power (Q), and reference generator shaft speed as input.
In the wind turbine system, the lumped generator model gets the power reference and approximate speed reference input from the wind turbine power control system. Based on the reference input, the generator applies the load torque to the wind turbine shaft and supply the electrical power to the grid.






where,
 is grid rms phase voltage at PCC
is grid rms phase voltage at PCC is grid rms phase current at PCC
is grid rms phase current at PCC is grid peak phase voltage at PCC
is grid peak phase voltage at PCC is grid peak phase current at PCC
is grid peak phase current at PCC is electrical generator peak induced phase voltage
is electrical generator peak induced phase voltage is electrical generator induced phase voltage
is electrical generator induced phase voltage is lumped leakage reactance of induction generator (wrt to stator)
is lumped leakage reactance of induction generator (wrt to stator) is lumped resistance of induction generator (wrt to stator)
is lumped resistance of induction generator (wrt to stator) is instantaneous grid voltage angle
is instantaneous grid voltage angle
Here, and are obtained from the PLL.
The lumped generator system model block should be used only in fixed frequency, full sinusoidal, and balanced three phase grid connected systems. This model is not suitable for the transient electrical stimulation such as the fault ride through and the grid frequency variation simulation.
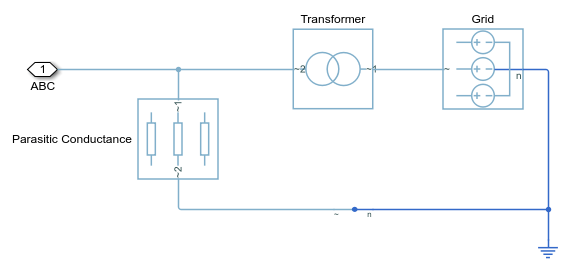
Grid and Transformer Subsystem
This subsystem demonstrates how to model the grid and transformer. The parasitic conductance is added to increase the simulation speed.
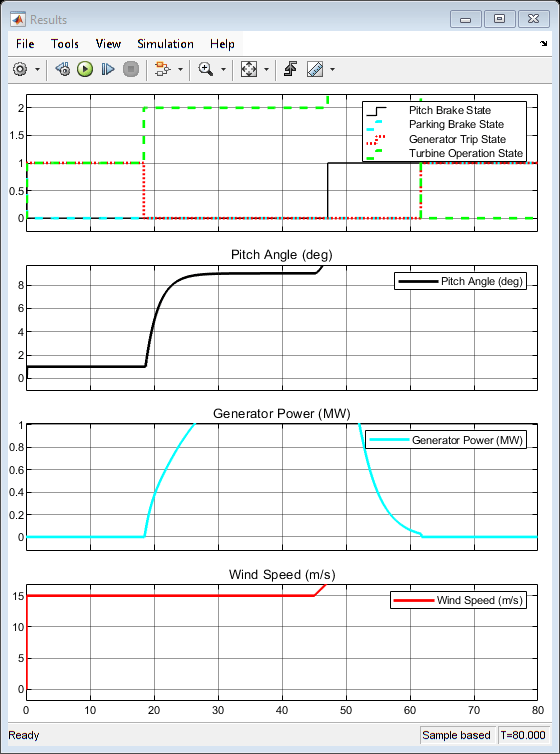
Simulation Results from Scope
This figure shows the supervisory control states, turbine blade pitch angle, generator power, and wind speed.
Simulation Results from Simscape Logging
This model generates plot of the state transitions, the normalized physical quantities such as the wind speed, wind turbine rotation speed, generator power, and pitch angle.