Force Actuator (PB)
Ideal force actuator, with length, that generates force proportional to the input signal
Since R2024b
Libraries:
Simscape /
Foundation Library /
Translational /
Sources
Description
The Force Actuator (PB) block represents an ideal force actuator that has length and generates a specified force regardless of the load or velocity at the connected ports.
Connections B and F are position-based translational conserving ports. Specify the force at physical signal port S. A positive signal at port S applies a positive force on the network at port F and acts to separate the ports B and F when the actuator length is positive.
For example, in this model, the Force Actuator (PB) block applies a positive force of 1 N between the two springs. The positive direction of the rail is horizontal, from left to right.
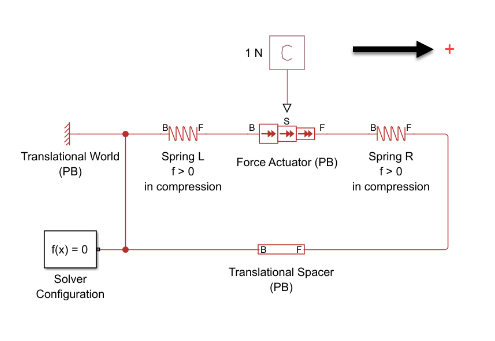
Port F applies a positive force to the spring on the right. This spring is in compression. At the same time, because the actuator force acts to separate the ports, Port B applies equal but opposite force to the spring on the left. This spring is also in compression.
The block logs these variables:
f— forcev— relative velocity,
For more information, see Data Logging.
The actuator length is .
The block has no parameters. You specify the actuator length as an initial variable target.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Examples
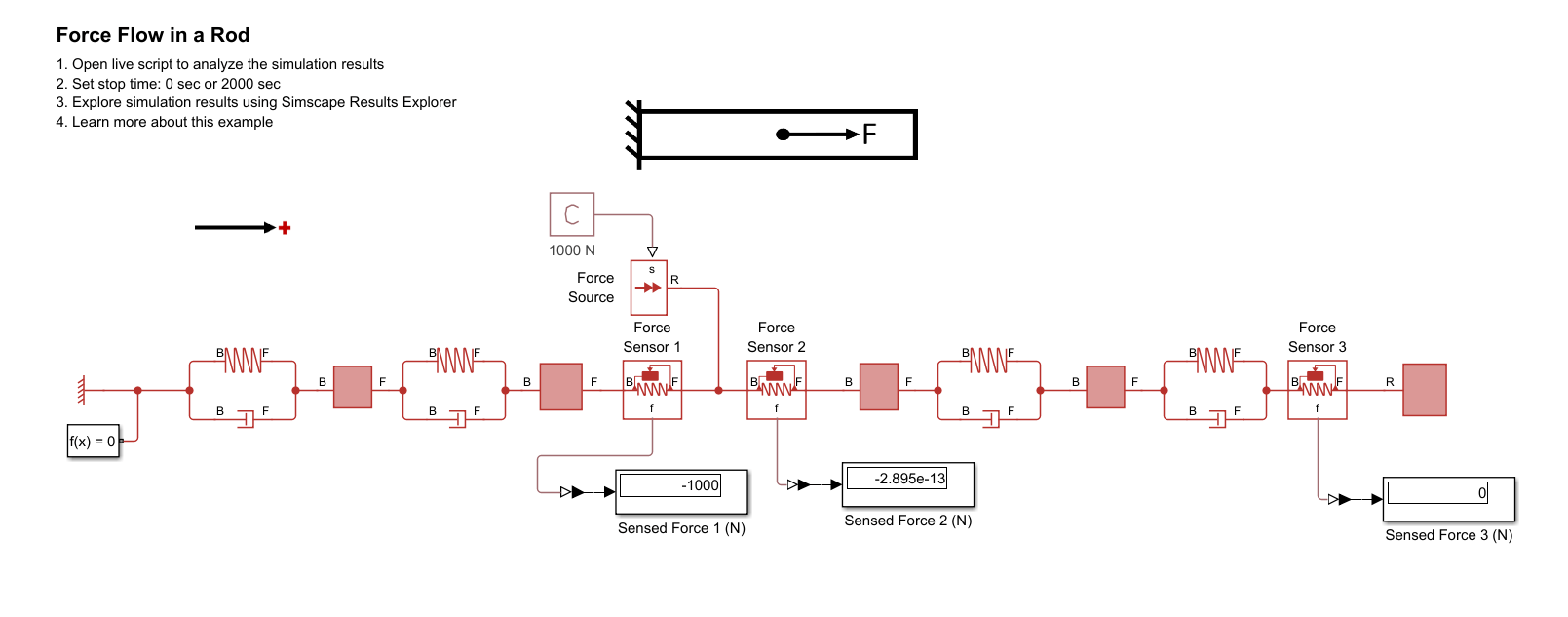
Force Flow in the Position-Based Translational Domain
Describes how to interpret forces in a Simscape™ mechanical position-based translational network. The example summarizes rules for interpreting the signs of logged forces and then considers forces in three types of systems: springs being pulled or pushed from different ends, simple systems with external forces applied at a mid-point, and a more complex system with an external force applied at the mid-point.
Ports
Input
Conserving
Extended Capabilities
Version History
Introduced in R2024b