Length Actuator (PB)
Libraries:
Simscape /
Foundation Library /
Translational /
Sources
Description
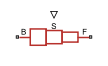
The Length Actuator (PB) block represents an ideal actuator that maintains a specified length regardless of the load at the connected ports.
Connections B and F are position-based translational conserving ports. The physical signal at port S specifies the distance between the ports B and F. A positive signal at port S indicates that port F has a more positive position than port B.
The block logs these variables:
f— force that port B applies to port F. A positive logged force indicates that the actuator acts to separate the ports when length is positive, that is, the actuator is in a state of compression. A negative logged force indicates that the actuator acts to bring the ports closer together when length is positive, that is, the actuator is in a state of tension.v— relative velocity,length— distance between ports, specified by the signal at port S, .
For more information, see Data Logging.
Ports
Input
Conserving
Extended Capabilities
Version History
Introduced in R2024b