Network Coupler (Flexible Shaft)
Libraries:
Simscape /
Utilities /
Network Couplers
Description
The Network Coupler (Flexible Shaft) block provides a starting point for you to split a Simscape™ network into two coupled networks at a mechanical rotational connection.
The Network Coupler (Flexible Shaft) block works by adding a compliance between the two networks. It is assumed that there is an inertia on either side of the coupler block. Do not connect the block ports directly to a torque source. You can connect the block ports to an ideal angular velocity source.
If your model has an existing flexible shaft (modeled as a Rotational
Spring block connected in parallel with a Rotational
Damper block), then use the Network Coupler (Flexible Shaft)
block to directly replace these two blocks. This avoids adding a second compliance with which
to separate the network. If there is no existing model compliance that you can use, then add a
numeric one by inserting the Network Coupler (Flexible Shaft) block at a
mechanical rotational connection and setting its Separate using parameter
to an added numerical compliance.
Working with the Block on the Model Canvas
When you add the block to your model and double-click it, the Network Coupler (Flexible Shaft) subsystem opens.
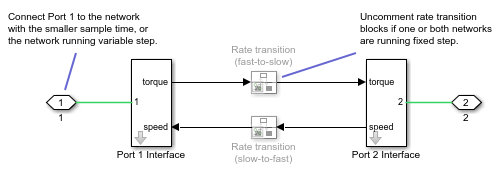
The Port 1 Interface block contains the dynamics that break the algebraic loop. Double-click this block to set all of the Network Coupler (Flexible Shaft) subsystem parameters and view the derived values.
The rate transition blocks are, by default, commented through. Uncomment them if at least one of the coupled networks is running fixed step.
Using the Derived Values to Estimate Block Parameters
On the Analysis tab of the Port 1 Interface block dialog box, the Derived values section contains a list of recommended values that you can use when specifying block parameters. For example, use the Recommended max discrete sample time (s) derived value to verify that your Port 1 network discrete sample time (s) and Port 2 network discrete sample time (s) parameter values are within acceptable limits.
The derived values list is based on the chosen block configuration. For example:
If you are using an existing compliance, the block uses information about the inertias of the connected networks, plus the compliance, to recommend either a maximum filter time constant, or a maximum discrete sample time. To do this, the block calculates overall network dynamic time constants and recommends the time constant (Recommended max filter time constant (s)) or sample time (Recommended max discrete sample time (s)) values that are commensurate with the fastest time constant.
If you are adding a numeric compliance, the block calculates the stiffness and damping required, based on the connected network inertias and the specified sample time or filter time constant. It also provides an estimate of the fastest trackable time constant. If the Calculated fastest trackable time constant (s) value is too slow for your application, then you must reduce the value you specified for the relevant block parameter, such as Separator time constant (s), Port 1 network discrete sample time (s), or Port 2 network discrete sample time (s).
The Update button lets you recalculate the derived values after you change the parameters of the connected networks.
Examples

Configuring an EV Simulation for Multirate HIL
An electric vehicle model suitable for multirate Hardware-In-the-Loop (HIL) deployment. The example uses the Simscape™ Network Couplers Library to split the model into separate Simulink® subsystems that can be deployed at different sample rates. This allows you to run parts of the system (for example thermal components) with a slower sample time thereby reducing overall computational cost.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2022a