PS Lookup Table (2D)
Approximate two-dimensional function using specified lookup method

Libraries:
Simscape /
Foundation Library /
Physical Signals /
Lookup Tables
Description
The PS Lookup Table (2D) block computes an
approximation to some function f=f(x1,x2) by interpolating the input
query point coordinates against a two-dimensional lookup table.
You define the lookup table by specifying the Table grid vector 1 parameter (vector of data points along the first axis), the Table grid vector 2 parameter (vector of data points along the second axis), and the 2D array of table values (array of output function values). The block works on a Cartesian mesh, that is, function values must be specified at vertices of a rectangular array.
The data vectors Table grid vector 1 and Table grid
vector 2 must be strictly monotonic, either increasing or decreasing. The
array size of the tabulated function values must match the dimensions defined by the
data vectors. That is, if the input data points are a 1-by-m vector
and a 1-by-n vector, supply an
m-by-n matrix of output function
values.
The two inputs and the output of the block are physical signals of matching size. The block generates the output based on the input query and the table grid lookup, using the selected interpolation and extrapolation methods. You have a choice of two interpolation methods and two extrapolation methods. You also have an option for the block to issue an error if any of the input signal values is outside the respective table grid vector range.
Examples
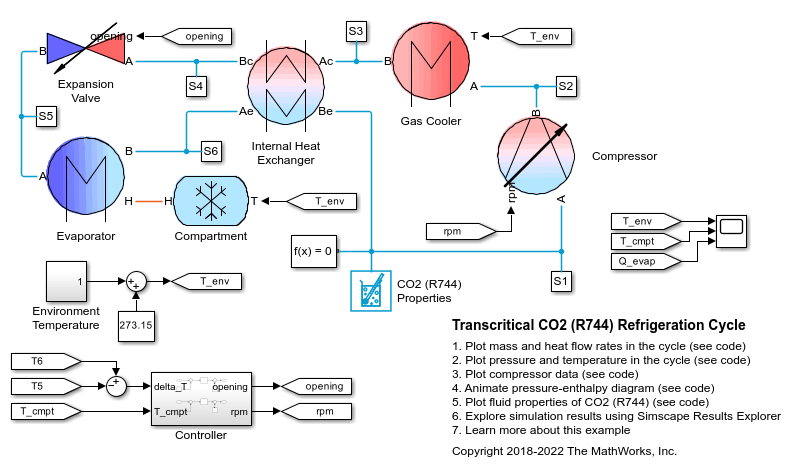
Transcritical CO2 (R744) Refrigeration Cycle
Models a vapor-compression refrigeration cycle in which the high pressure portion of the cycle operates in the supercritical fluid region. The refrigerant is carbon dioxide (CO2), also called R744 in this application.