Translational Damper (PB)
Libraries:
Simscape /
Foundation Library /
Translational /
Elements
Description
The Translational Damper (PB) block represents an ideal viscous damper in position-based translational systems. The block uses these equations
where:
f is force transmitted through the damper.
D is damping coefficient, defined by viscous friction.
vrel is relative velocity.
vF and vB are the absolute velocities of ports B and F, respectively.
length is the damper length.
xB and xF are the absolute positions of ports B and F, respectively.
Connections B and F are position-based translational conserving ports. The damper force acts from port B on port F. The negative sign in the first equation reflects the force flow conventions used in the position-based translational domain. For more information, see Two-Port Block Orientation and Force Flow Conventions.
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Examples
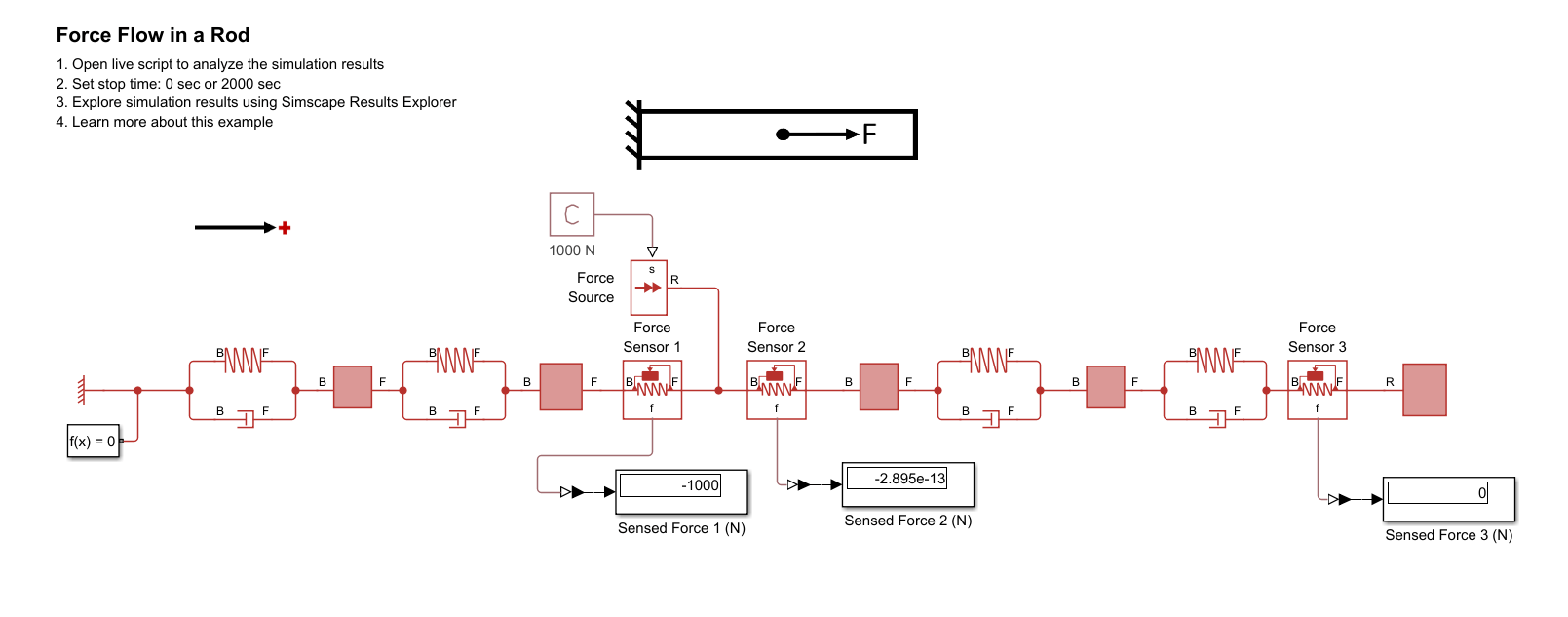
Force Flow in the Position-Based Translational Domain
Describes how to interpret forces in a Simscape™ mechanical position-based translational network. The example summarizes rules for interpreting the signs of logged forces and then considers forces in three types of systems: springs being pulled or pushed from different ends, simple systems with external forces applied at a mid-point, and a more complex system with an external force applied at the mid-point.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2024b