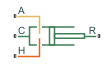
Translational Mechanical Converter (TL)
Interface between thermal liquid and mechanical translational networks
Libraries:
Simscape /
Foundation Library /
Thermal Liquid /
Elements
Description
The Translational Mechanical Converter (TL) block models an interface between a thermal liquid network and a mechanical rotational network. The block converts thermal liquid pressure into mechanical force and vice versa. It can be used as a building block for linear actuators.
The converter contains a variable volume of liquid. The temperature evolves based on the thermal capacity of this volume. If the Enable dynamic compressibility check box is selected, then the pressure also evolves based on the dynamic compressibility of the liquid volume. The Mechanical orientation parameter lets you specify whether an increase in pressure moves port R away from or towards port C.
Port A is the thermal liquid conserving port associated with the converter inlet. Port H is the thermal conserving port associated with the temperature of the liquid inside the converter. Ports R and C are the mechanical translational conserving ports associated with the moving interface and converter casing, respectively.
Mass Balance
The mass conservation equation in the mechanical converter volume is
where:
is the liquid mass flow rate into the converter through port A.
ε is the mechanical orientation of the converter (
1if increase in fluid pressure causes positive displacement of R relative to C,-1if increase in fluid pressure causes negative displacement of R relative to C).ρ is the liquid mass density.
S is the cross-sectional area of the converter interface.
v is the translational velocity of the converter interface.
V is the liquid volume inside the converter.
β is the liquid bulk modulus inside the converter.
α is the coefficient of thermal expansion of the liquid.
p is the liquid pressure inside the converter.
T is the liquid temperature inside the converter.
If you connect the converter to a Multibody joint, use the physical signal input port p to specify the displacement of port R relative to port C. Otherwise, the block calculates the interface displacement from relative port velocities, according to the block equations. The interface displacement is zero when the liquid volume is equal to the dead volume. Then, depending on the Mechanical orientation parameter value:
If
Pressure at A causes positive displacement of R relative to C, the interface displacement increases when the liquid volume increases from dead volume.If
Pressure at A causes negative displacement of R relative to C, the interface displacement decreases when the liquid volume increases from dead volume.
Momentum Balance
The momentum conservation equation in the mechanical converter volume is
where:
F is the force the liquid exerts on the converter interface.
pAtm is the atmospheric pressure.
Energy Balance
The energy conservation equation in the mechanical converter volume is
where:
u is the liquid internal energy.
ϕA is the total energy flow rate into the mechanical converter volume through port A.
QH is the heat flow rate into the mechanical converter volume.
Assumptions and Limitations
Converter walls are not compliant. They cannot deform regardless of internal pressure and temperature.
The converter contains no mechanical hard stops. To include hard stops, use the Translational Hard Stop block.
The flow resistance between the inlet and the interior of the converter is negligible.
The thermal resistance between the thermal port and the interior of the converter is negligible.
The kinetic energy of the fluid in the converter is negligible.
Examples
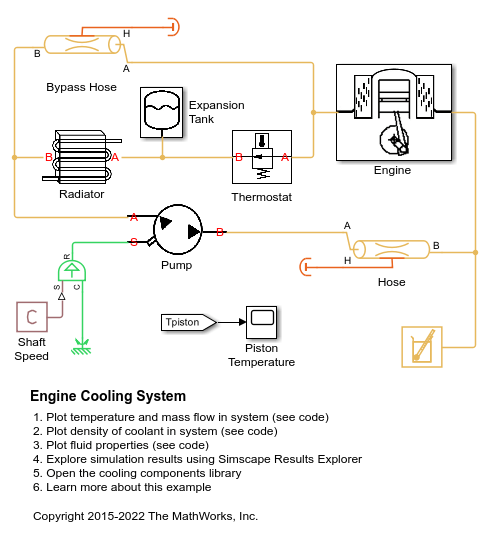
Engine Cooling System
Model a basic engine cooling system using custom thermal liquid blocks. A fixed-displacement pump drives water through the cooling circuit. Heat from the engine is absorbed by the water coolant and dissipated through the radiator. The system temperature is regulated by the thermostat, which diverts flow to the radiator only when the temperature is above a threshold.
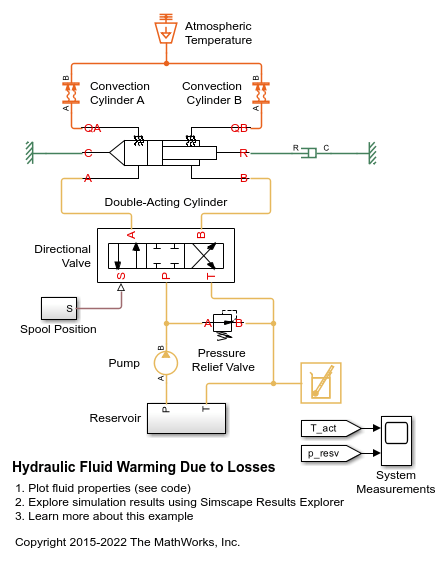
Hydraulic Fluid Warming Due to Losses
Model shows how Foundation Library thermal liquid components can be used to estimate the impact of viscous losses on an actuating system's temperature over a long time scale. A pump supplies energy to the system to actuate a double-acting cylinder periodically. The pressure losses within directional valve converts the energy into heat. Heat transfer through the cylinder casing to the environment provides a heat sink.
Ports
Input
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2013b