Translational Multibody Interface
Interface between mechanical translational networks and Simscape Multibody joints

Libraries:
Simscape /
Foundation Library /
Mechanical /
Multibody Interfaces
Description
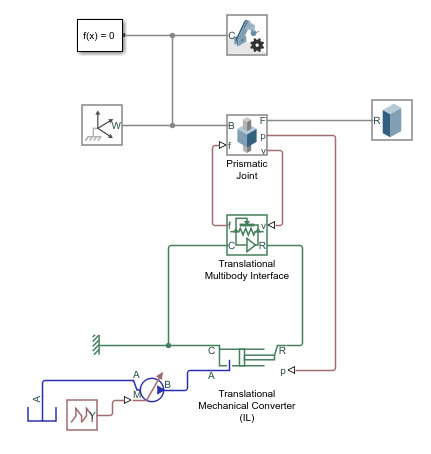
The Translational Multibody Interface block implements an intuitive way to connect Simscape™ blocks that have mechanical translational ports with Simscape Multibody™ joints that have prismatic primitives. Simscape blocks that can be connected to a Translational Multibody Interface block include:
Blocks from the Foundation > Mechanical > Translational Elements library, such as Translational Friction or Translational Damper.
Blocks with mechanical translational ports from other Foundation libraries, such as Translational Mechanical Converter (G) or Translational Mechanical Converter (IL).
Blocks with mechanical translational ports from add-on products, such as hydraulic actuators from the Simscape Fluids™ libraries.
The Translational Multibody Interface block matches the force and relative velocity across the interface. You can connect it to any Simscape Multibody joint that has a prismatic primitive:
Enable the velocity sensing port v and the force actuation port f on the joint. If the joint has multiple degrees of freedom, make sure that the selected velocity sensing and force actuation correspond to the same degree of freedom.
Connect physical signal ports v and f of the Translational Multibody Interface block to ports v and f of the Simscape Multibody joint.
Connect ports C and R of the Translational Multibody Interface block to a Simscape mechanical translational network.

For detailed step-by-step instructions, see Connecting Simscape Networks to Simscape Multibody Joints.
Blocks like Translational Friction and Translational Damper do not require position information, and for these blocks the interface based on force and relative velocity is sufficient. Other blocks, like hydraulic actuators, require information on relative position between their ports. To connect these blocks to a Simscape Multibody joint:
Use the Translational Multibody Interface block. Enable the velocity sensing port v and the force actuation port f on the joint, and connect the ports as described above.
Additionally, enable the position sensing port p on the joint. If the joint has multiple degrees of freedom, make sure that the position and velocity sensing and force actuation all correspond to the same degree of freedom.
On the actuator block, enable the position input port p, by setting the Interface displacement parameter to
Provide input signal from Multibody joint. Connect the position input port p on the actuator block to the position sensing port p of the Simscape Multibody joint.
Assumptions and Limitations
For models with Translational Multibody Interface or Rotational Multibody Interface blocks, it is recommended that you use Simscape Multibody blocks to model masses and inertias. The reason is that Simscape networks need to have a ground (reference) node, with all the masses and inertias in the network accelerating with respect to this node. In a Simscape Multibody joint, both the base and follower frames may be accelerating. Therefore, a mass or inertia in the Simscape network connected to a joint may not have the correct inertial reference.
Examples
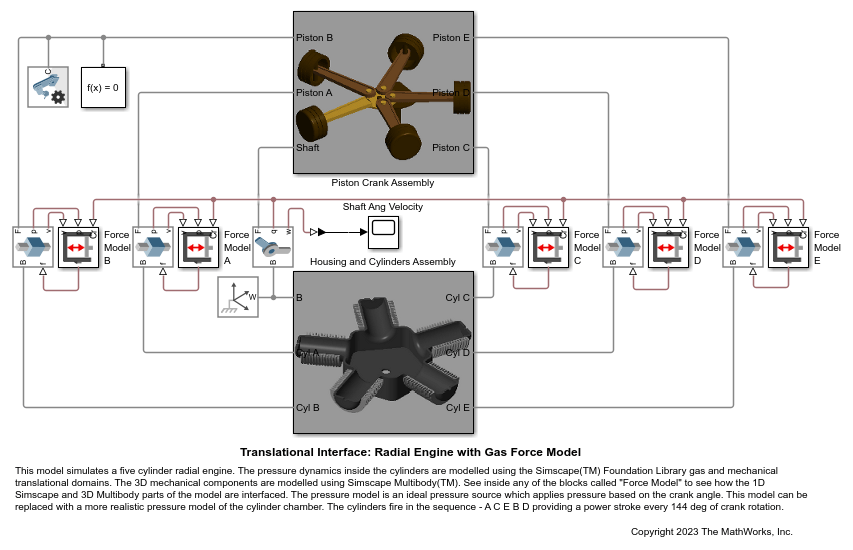
Translational Interface: Radial Engine with Gas Force Model
This model simulates a five cylinder radial engine. The pressure dynamics inside the cylinders are modeled using the Simscape™ Foundation Library gas and mechanical translational domains. The 3D mechanical components are modeled using Simscape Multibody™. See inside any of the blocks called "Force Model" to see how the 1D Simscape and 3D Multibody parts of the model are interfaced. The pressure model is an ideal pressure source which applies pressure based on the crank angle. This model can be replaced with a more realistic pressure model of the cylinder chamber. The cylinders fire in the sequence - A C E B D providing a power stroke every 144 deg of crank rotation.
Ports
Input
Output
Conserving
Version History
Introduced in R2021a