Translational Motion Sensor (PB)

Libraries:
Simscape /
Foundation Library /
Translational /
Sensors
Description
The Translational Motion Sensor (PB) block measures absolute or relative position, velocity, and acceleration in a position-based translational network. The measurement is positive when the motion at port F is greater than at port B. The sensor does not apply force to the network.
Connections B and F are position-based translational conserving ports.
Connections A, V, and P are physical signal output ports for acceleration, velocity, and position, respectively. The visibility of these ports is controlled by block parameters. If you enable port A, the block performs additional computations, to measure acceleration based on velocity. To avoid unnecessary model complexity, it is recommended that in each instance of the block you enable only the ports that you actually use for measurement.
Examples
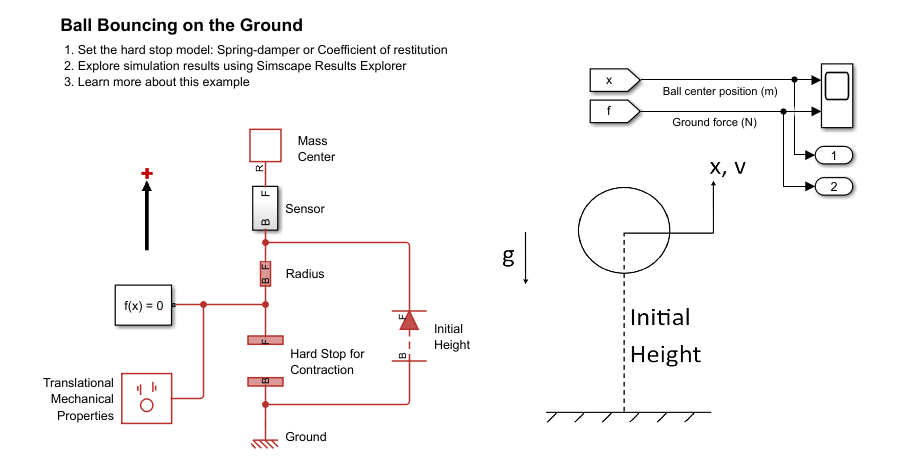
Hard Stops in the Position-Based Translational Domain
Configure Translational Hard Stop (PB) blocks in several simple position-based translational models and interpret the model behavior. This example describes how to model systems with upper and lower bounds, choose a hard stop model parameterization, set initial targets for variables, and interpret the logged forces.
Ports
Output
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2024b