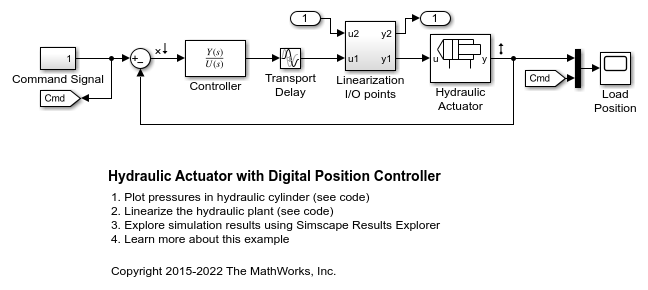
带数字位置控制器的液压作动器
警告:此示例使用液压域,该域将在以后的版本中删除。在此处查找使用等温液体域的等效示例模型:带数字位置控制器的液压作动器。要将模型转换为等温液体域,请使用 hydraulicToIsothermalLiquid 工具。
此示例展示了与双作用气缸一起在闭环回路中起作用的二通阀。此控制器表示为连续时间传递函数加传输延迟。当以离散时间实现时,延迟允许计算时间(一个离散时间周期)加上零阶保持(半个离散时间周期)。该模型被配置为线性化,以便产生频率响应。要进行配置以实现更快的桌面仿真,请注释直通传输延迟并增加求解器最大步长。
模型
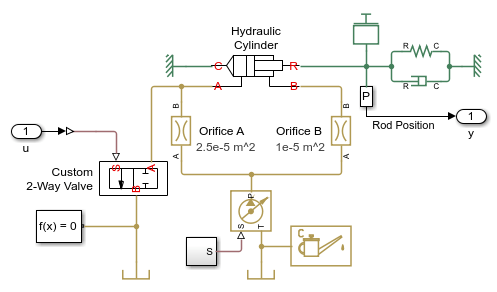
液压作动器子系统
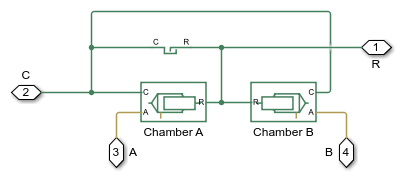
液压缸子系统
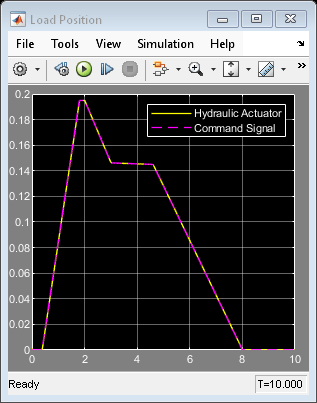
来自示波器的仿真结果
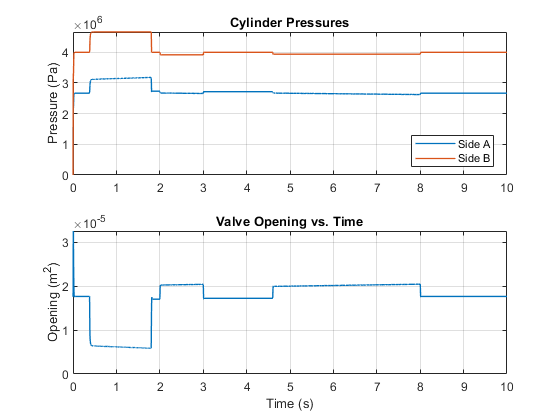
来自 Simscape 记录的仿真结果
频率响应

