多核处理器目标
多核编程,或者说并行执行建模,可以帮助您创建并行系统,以便部署到多核处理器和多处理器系统中。此类系统的示例包括信号处理和被控对象-控制系统。Simulink® 分区和映射技术可以帮助您解决设计并行执行系统时常见的难题。
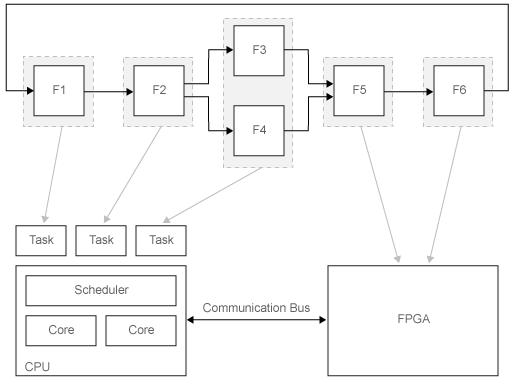
图中显示了一个示例系统,其中的多个功能便是针对在基于 CPU 和 FPGA 的多处理器系统上执行而设计的。该系统被分成多个组件,它们被映射到 CPU 任务计划程序或 FPGA。
要了解多核编程的基础知识,请参阅Concepts in Multicore Programming。有关如何在 Simulink 中设计并行执行系统的信息,请参阅使用 Simulink 进行多核编程。
函数
Simulink.architecture.config | Create or convert configuration for concurrent execution |
Simulink.architecture.add | Add tasks or triggers to selected architecture of model |
Simulink.architecture.delete | Delete triggers and tasks from selected architecture of model |
Simulink.architecture.find_system | Find objects under architecture object |
Simulink.architecture.get_param | Get configuration parameters of architecture objects |
Simulink.architecture.importAndSelect | Import and select target architecture for concurrent execution environment for model |
Simulink.architecture.profile | Generate profile report for model configured for concurrent execution |
Simulink.architecture.register | Add custom target architecture to concurrent execution target architecture selector |
Simulink.architecture.set_param | Set architecture object properties |
对象
Simulink.GlobalDataTransfer | Configure concurrent execution data transfers |
工具
| 并发执行工具 | Specify tasks, triggers, and nodes for concurrent execution of Simulink model |
主题
了解 Simulink 中的多核编程
- Concepts in Multicore Programming
Theory relevant to modeling for concurrent execution. - 使用 Simulink 进行多核编程
使用 Simulink 进行并发执行建模。 - Implicit and Explicit Partitioning of Models
Learn about the key differences between implicit and explicit partitioning. - Supported Targets for Multicore Programming
Deploy concurrent execution models to supported multicore targets. - Limitations with Multicore Programming in Simulink
Limitations and considerations when partitioning a model for concurrent execution.
配置您的模型
- 为并发执行配置您的模型
了解如何配置您的 Simulink 模型以利用并发执行。 - Specify a Target Architecture
Choose or define a target architecture for a model configured for concurrent execution. - Partition Your Model Using Explicit Partitioning
Add tasks, create partitions, and map individual tasks to partitions using explicit partitioning. - Configure Data Transfer Settings Between Concurrent Tasks
Specify options for handling data transfers between concurrently executing partitions.
在 Simulink 中实现并行机制
- Implement Data Parallelism in Simulink
This example shows how to implement data parallelism for a system in a Simulink model. - Implement Task Parallelism in Simulink
This example shows how to implement task parallelism for a system represented in a Simulink® model. - Implement Pipelining in Simulink
This example shows how to implement pipelining for a system represented in a Simulink® model.
代码生成
- Optimize and Deploy on a Multicore Target
Configure a model for concurrent execution using explicit partitioning and deploy it to a target. - Assign Tasks to Cores for Multicore Programming
This example shows how to take advantage of executing code on a multicore processor by graphical partitioning.
相关信息
精选示例

Assign Tasks to Cores for Multicore Programming
Take advantage of executing code on a multicore processor by graphical partitioning. This example requires Simulink® Coder™ software to generate multithreaded code.
Implement an FFT on a Multicore Processor and an FPGA
Take advantage of a multicore processor target with FPGA acceleration by graphically partitioning a model. This example requires Simulink® Coder™ to generate multi-threaded code and HDL Coder™ to generate HDL code. You cannot generate HDL code on Macintosh systems.
Multicore Programming of a Field-Oriented Control on Zynq
Demonstrates how to implement a control algorithm that contains multiple rates on Zynq®. To take advantage of both the cores and the FPGA hardware, the example uses a graphical partitioning approach such that code from different partitions is distributed across the cores and the hardware.
Multicore Deployment of a Plant Model
Illustrates how to take advantage of executing multithreaded code on a multicore processor using graphical partitioning. This example requires Simulink® Coder™ to generate multithreaded code.

Modeling Objects with Identical Dynamics Using For Each Subsystem
Model multiple objects with identical dynamics using the For Each subsystem. The number of objects is parameterized by the length of the input signal.
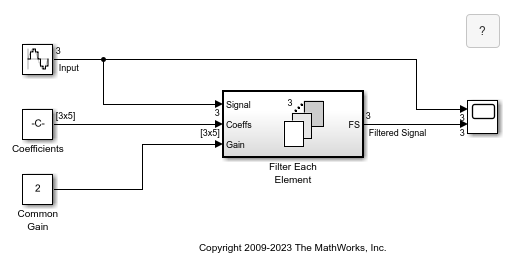
Vectorizing a Scalar Algorithm with a For-Each Subsystem
Use the for-each subsystem. In this example, the operations are performed on a vector for simplicity.
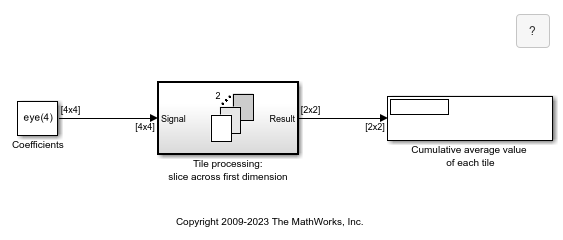
Tiled Processing of 2-D Signals with For-Each Subsystem
Use a for-each subsystem. In this example, the operations are performed on matrices.

Multithreaded Simulation Using For Each Subsystem
Speed up execution of a model on multiple cores using a For Each Subsystem in Rapid Accelerator simulation.