Active Disturbance Rejection Control

库:
Simulink Control Design /
Adaptive Control
描述
使用 Active Disturbance Rejection Control 模块,您可以为具有未知动态特性以及内外部扰动的被控对象设计自抗扰控制 (ADRC)。ADRC 是一种无模型控制方法,它只需逼近被控对象动态特性,即可设计提供稳健抗扰性能的控制器。
该模块使用已知系统动态特性的一阶或二阶模型逼近以及建模为被控对象的扩张状态的未知动态特性和扰动。通常,您可以根据工作范围内被控对象的开环阶跃响应来确定此阶数。
一阶逼近 -
二阶逼近 -
其中:
y(t) 是被控对象输出。
u(t) 是输入信号。
b0 是临界增益,它是描述被控对象对输入 u(t) 的响应的估计增益。
f(t) 是总扰动,包括未知动态特性扰动和其他扰动。
该模块使用扩张状态观测器 (ESO) 来估计 f(t),并通过减少估计的扰动对模型逼近已知部分的影响来实现抗扰控制。为了调节 ADRC,需要设置适当的时域、模型类型和临界增益、控制器和观测器带宽以及初始条件。
有关详细信息,请参阅自抗扰控制。
示例

为水箱系统设计自抗扰控制
为水箱模型设计 ADRC,并与增益调度 PID 控制器比较性能。
为升压转换器设计自抗扰控制
为升压转换器模型设计 ADRC,并与在线性化模型上调节的 PID 控制器比较性能。

使用 PWM 为 BLDC 转速控制设计自抗扰控制
使用脉冲宽度调制为无刷 DC 电机转速控制器设计 ADRC。
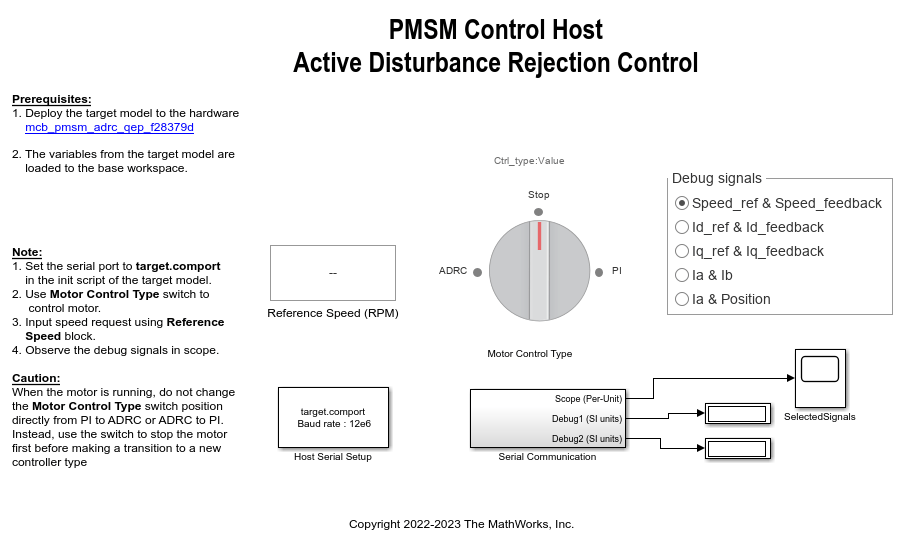
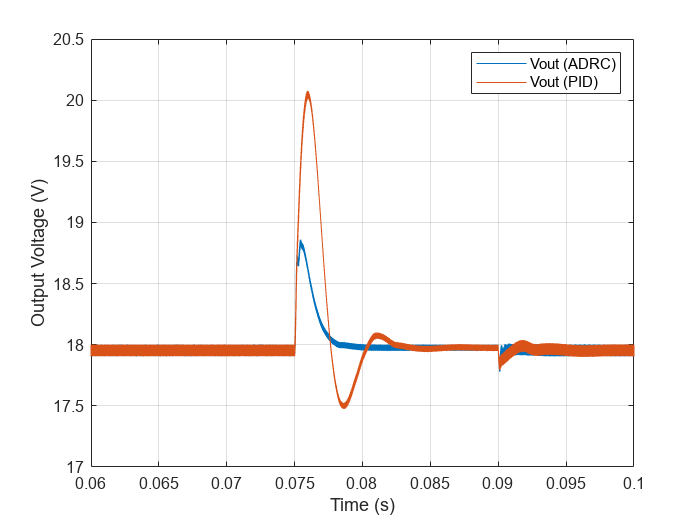
Implement PMSM Speed Control Using Active Disturbance Rejection Control
Implement active disturbance rejection control (ADRC) of the speed of a permanent magnet synchronous motor (PMSM) modeled in Simulink® using the Active Disturbance Rejection Control block. You can use the example to implement field-oriented control (FOC) using either a proportional integral (PI) or ADRC-based controller to run the motor in the speed control mode. Therefore, you can compare the performance of the PI and ADRC controllers.