Barrier Certificate Enforcement
Modify control actions to satisfy barrier certificate constraints and action bounds
Since R2022a
Libraries:
Simulink Control Design /
Constraint Control
Description
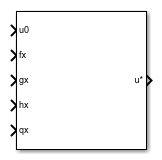
The Barrier Certificate Enforcement block computes the modified control actions that are closest to specified control actions subject to barrier certificate constraints and action bounds.
The block uses a quadratic programming (QP) solver to find the control action u that minimizes the function . Here, u0 is the unmodified control action.
The solver applies the following constraints to the optimization problem.
Here:
fx and gx are functions defined by the plant dynamics .
hx is the control barrier function.
qx is the partial derivative of the control barrier function over states x.
γ is the constraint factor.
β is the constraint power.
umin is a lower bound for the control action.
umax is an upper bound for the control action.
The Barrier Certificate Enforcement block requires Optimization Toolbox™ software.
For more information on barrier certificate enforcement, see Barrier Certificate Enforcement for Control Design.
Examples

Enforce Barrier Certificate Constraints for PID Controllers
Apply barrier certificate constraints to a PID control application using the Barrier Certificate Enforcement block.
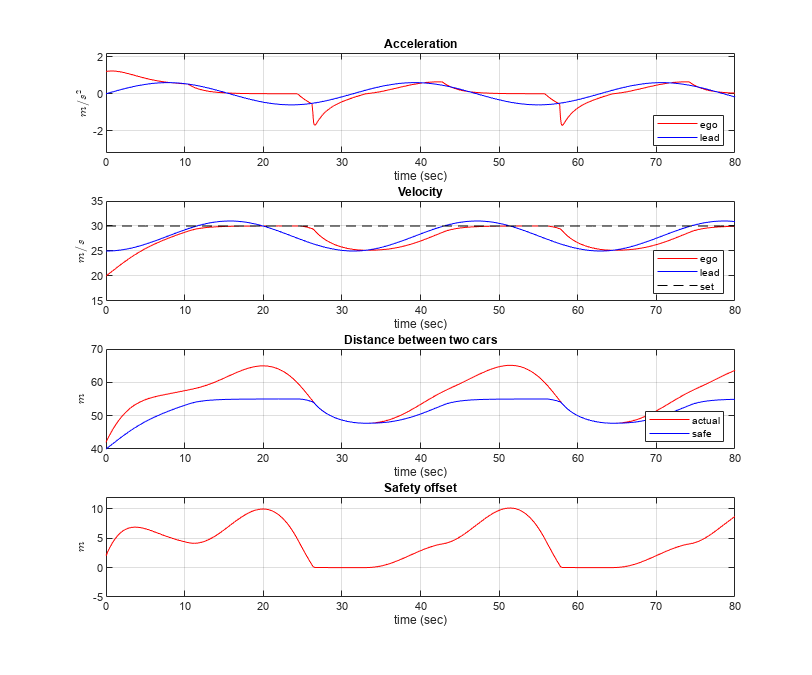
Enforce Barrier Certificate Constraints for Adaptive Cruise Control
Enforce barrier certificate constraints for adaptive cruise control to maintain velocity and following distance.
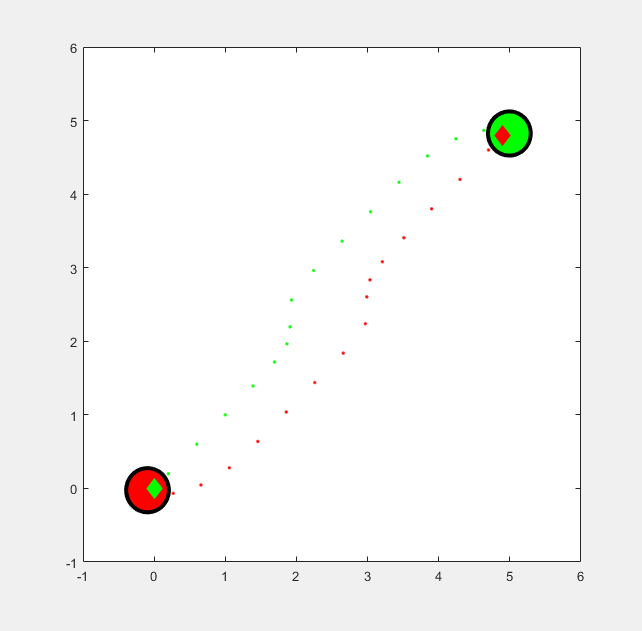
Enforce Barrier Certificate Constraints for Collision-Free Robots
Enforce barrier certificate constraints for two robots to reach their target positions in collision-free manner.
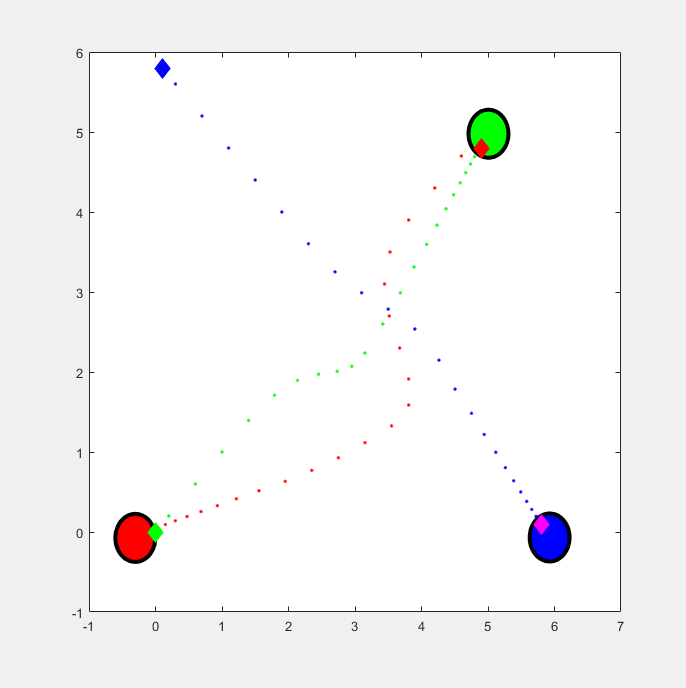
Enforce Barrier Certificate Constraints for Collision-Free Multi-Robot System
Enforce barrier certificate constraints for three robots to reach their target positions in collision-free manner.