How the Software Treats Loop Openings
Simulink® Control Design™ software linearizes models using a block-by-block approach. The software individually linearizes each block in your Simulink model and produces the linearization of the overall system by combining the individual block linearizations. For more information, see Exact Linearization Algorithm.
To obtain an open-loop transfer function from a model, you specify a loop opening. Loop openings affect only how the software recombines the individual linearized blocks. In other words, the software ignores loop openings when determining the input signal levels for each block, which affects how nonlinear blocks are linearized.
For example, in the following model, to compute the response from e2 to y2 without the effects of the outer loop, you open the outer loop by placing a loop opening analysis point at y1.
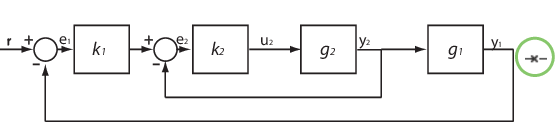
Here, k1, k2, g1, and g2 are nonlinear blocks.
The software linearizes each individual block at the specified operating point, creating the linearized blocks K1, K2, G1, and G2. At this stage, the software does not break the signal flow at y1. Therefore, the block linearizations include the effects of the inner-loop and outer-loop feedback signals.
To compute the transfer function from e2 to y2, the software enforces the loop opening at y1, injects an input signal at e2, and measures the output at y2.
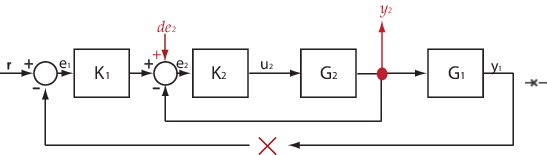
Here, K1, K2, G1, and G2 are the linearized blocks.
The resulting linearized transfer function is (I+G2K2)-1G2K2.
See Also
linearize | addOpening | getIOTransfer | getLoopTransfer | getSensitivity | getCompSensitivity