计算开环响应
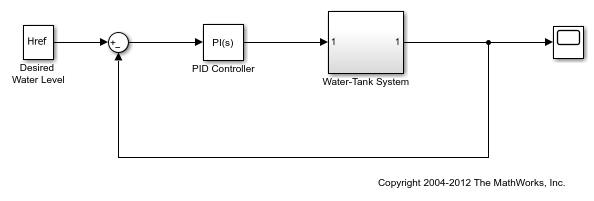
控制系统的开环响应是被控对象和控制器的组合响应,排除反馈环的影响。例如,以下模块图显示一个单环控制系统。
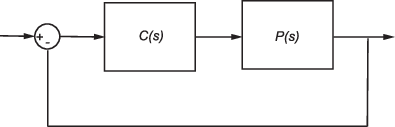
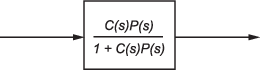
如果控制器 C(s) 和被控对象 P(s) 为线性,则对应的开环传递函数为 C(s)P(s)。

要消除反馈环的影响,请插入一个环路开口分析点,而不要手动断开信号线。手动从非线性模型中删除反馈信号会更改模型工作点并产生不同的线性化模型。有关详细信息,请参阅How the Software Treats Loop Openings。
如果不插入环路开口,生成的线性模型将包括反馈环的影响。
要为此示例指定环路开口,您可以使用以下分析点之一。
| 分析点 | 描述 | 计算 C(s)P(s) |
|---|---|---|
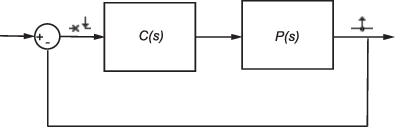
| 指定一个后跟输入扰动的环路开口。 | 在控制器的输入端指定一个开环输入,在被控对象的输出端指定一个输出测量。
| |
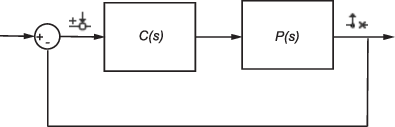
| 指定一个后跟环路中断的输出测量。 | 在被控对象的输出端指定开环输出,在控制器的输入端指定输入扰动。
|
对于某些系统,您无法在与线性化输入或输出点相同的位置指定环路开口。例如,为了打开以下系统中的外环,使用环路中断分析点 ![]() 将一个环路开口点添加到反馈路径。因此,只有蓝色模块位于线性化路径中。
将一个环路开口点添加到反馈路径。因此,只有蓝色模块位于线性化路径中。
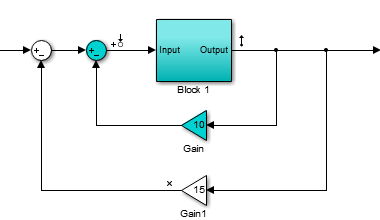
将环路开口放置在与输入或输出信号相同的位置还会从线性化结果中消除内环的影响。
您可以在 Simulink® 模型中、在模型线性化器中或在命令行中直接指定分析点。有关不同类型的分析点以及如何定义它们的详细信息,请参阅指定要线性化的模型部分。
使用模型线性化器计算开环响应
此示例说明如何在没有反馈信号影响的情况下计算组合控制器被控对象系统的线性模型。例如,您可以使用波特图来分析生成的线性模型。
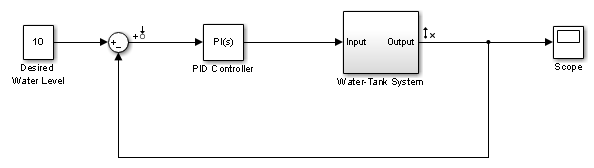
打开 Simulink 模型。
openExample("watertank")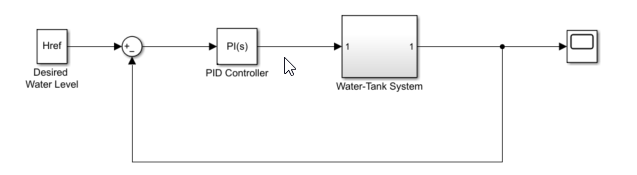
Water-Tank System 模块表示此控制系统中的被控对象,包括所有系统非线性部分。
在 Simulink 模型窗口中,指定要线性化的模型部分。对于此示例,使用开环输出分析点指定环路开口。
打开线性化选项卡。为此,请在 App 库中,点击线性化管理器。
要指定信号的分析点,请点击模型中的信号。然后,在线性化选项卡上的插入分析点库中,选择分析点的类型。
将 PID Controller 模块的输入信号配置为输入扰动。
将 Water-Tank System 模块的输出信号配置为开环输出。
模型中会显示注解,指示将哪些信号指定为分析点。
提示
如果您不想给 Simulink 模型带来任何更改,可以在模型线性化器中指定分析点。有关详细信息,请参阅指定要在模型线性化器中线性化的模型部分。
打开模型的模型线性化器。在 Simulink 模型窗口的 App 库中,点击模型线性化器。
默认情况下,将选择您在模型中指定的分析点以进行线性化,如分析 I/O 下拉列表中所示。
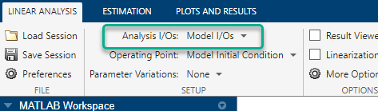
要使用指定的分析点线性化模型并生成线性化模型的波特图,请点击  波特。
波特。
默认情况下,模型线性化器在模型初始条件下线性化模型,如工作点下拉列表中所示。有关如何在不同工作点处线性化模型的示例,请参阅在配平工作点处进行线性化和在仿真快照处线性化。
提示
要生成波特图以外的响应类型,请点击图库中的相应按钮。
要查看模型的最小稳定裕度,请右键点击波特图,然后选择特征 > 最小稳定裕度。
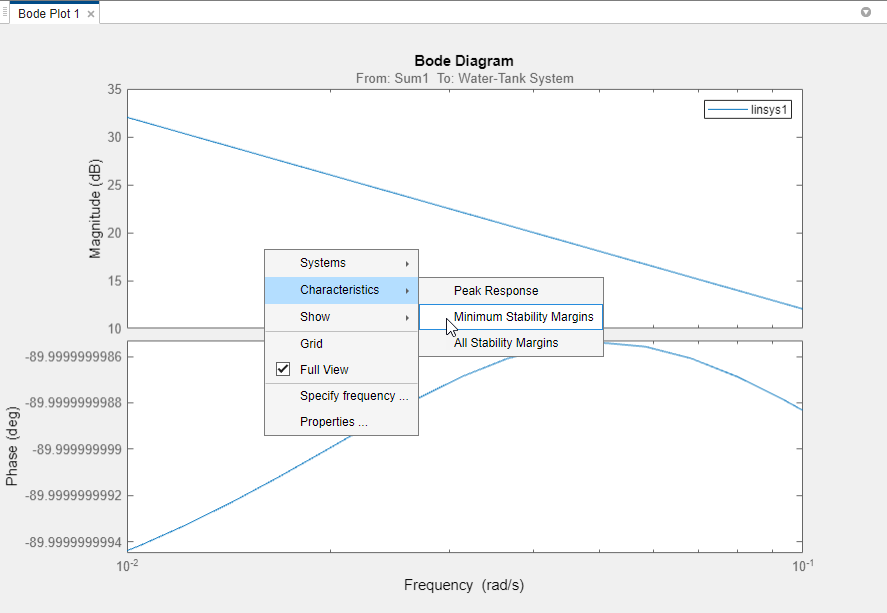
波特图显示相位裕度标记。要显示包含相位裕度值的数据提示,请点击该标记。
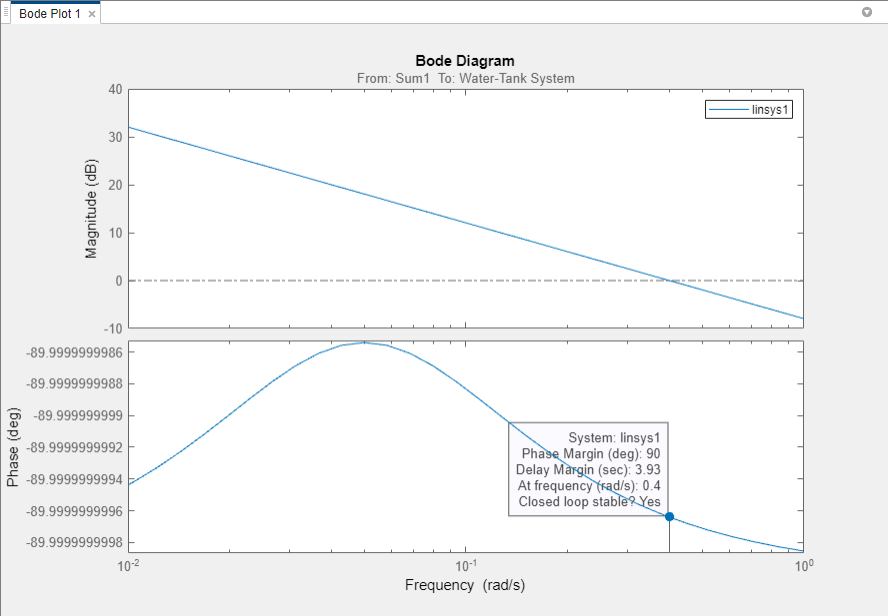
对于此系统,当穿越频率为 0.4 弧度/秒时,相位裕度为 90 度。
在命令行中计算开环响应
此示例说明如何在没有反馈信号影响的情况下计算组合控制器被控对象系统的线性模型。例如,您可以使用波特图来分析生成的线性模型。
打开 Simulink 模型。
sys = 'watertank';
open_system(sys)
通过使用 linio 命令创建一个分析点数组,指定要线性化的模型部分:
在 PID Controller 模块输入端的开环输入点。此信号源于 Sum1 模块的输出。
在 Water-Tank System 模块输出端的输出测量。
io(1) = linio('watertank/Sum1',1,'openinput'); io(2) = linio('watertank/Water-Tank System',1,'output');
开环输入分析点包括一个环路开口,后者中断信号流并消除反馈环的影响。
使用 linearize 命令在默认模型工作点上线性化模型。
linsys = linearize(sys,io);
linsys 是系统的线性化开环传递函数。现在,您可以分析响应,例如,绘制其频率响应并查看增益和相位裕度。
margin(linsys)
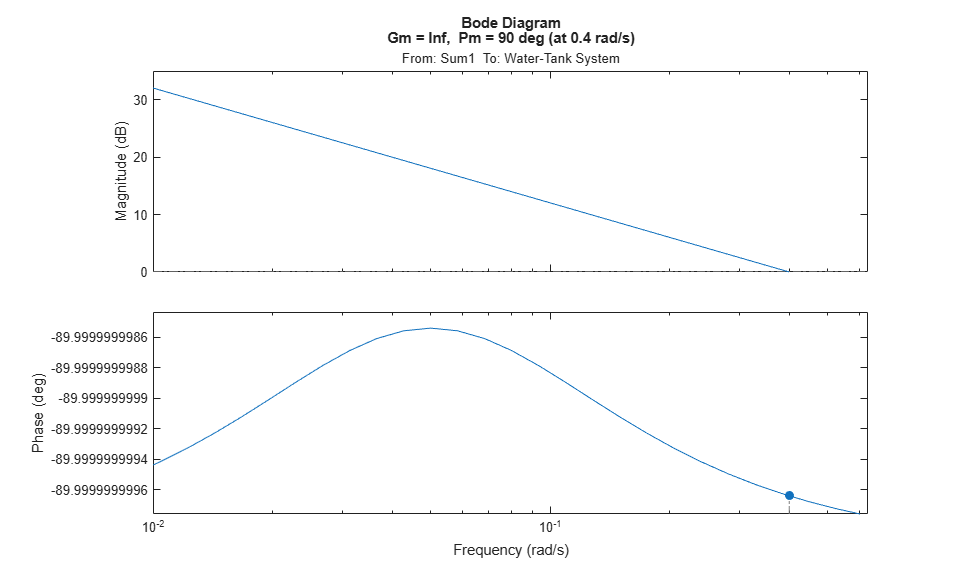
对于此系统,增益裕度为无限值,当穿越频率为 0.4 弧度/秒时,相位裕度为 90 度。