magball Simulink 模型
Simulink® 模型 magball 包括一个单环反馈系统中的非线性 Magnetic Ball Plant。
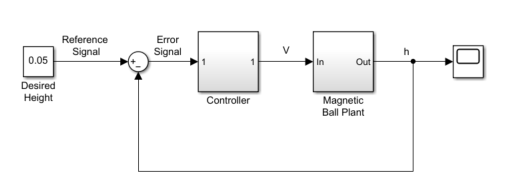
Magnetic Ball Plant 子系统如下图所示。
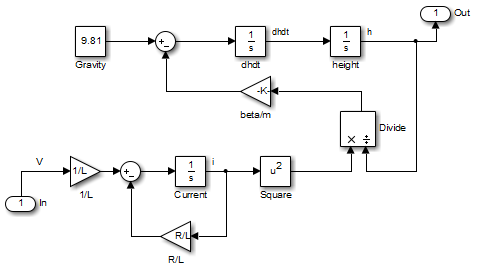
Magnetic Ball Plant 模型表示质量为 M 的铁球。此球在重力 Mg 和感应磁力 的作用下运动。感应磁力中存在平方项,这导致生成一个非线性被控对象。
如下图所示,电路中的电感器产生感应磁力。此电路还包括电压源和电阻器。

下表描述 Magnetic Ball Plant 子系统的变量、参数、微分方程、状态、输入和输出。
| 变量 | h 是球的高度。 i 是电流。 V 是电路中的电压。 |
| 参数 | M 是球的质量。 g 是重力加速度。 β 是与磁力有关的常量。 L 是线圈的电感。 R 是电路的电阻。 |
| 微分方程 | 球的高度 h 用以下方程描述: 电路中的电流 i 用以下方程描述: |
| 状态 | h dh/dt i |
| 输入 | V |
| 输出 | h |