Start-Stop Generator
Generate start-stop signal used by signal generation, estimation, and autotuning blocks
Since R2024a
Libraries:
Simulink Control Design /
Signal Generation
Description
Use this block to generate a signal for the start/stop input port of signal generation, frequency response estimation, and PID autotuning blocks in Simulink® Control Design™ library. This port determines when to start and stop generating the perturbation signal in these blocks. The Start-Stop Generator block generates a signal that changes from 0 to 1 at the specified time values to enable the blocks, and from 1 to 0 to disable after the specified duration has passed.
This block is helpful when you to generate start-stop signal to enable estimation or autotuning process at different operating conditions.
Examples
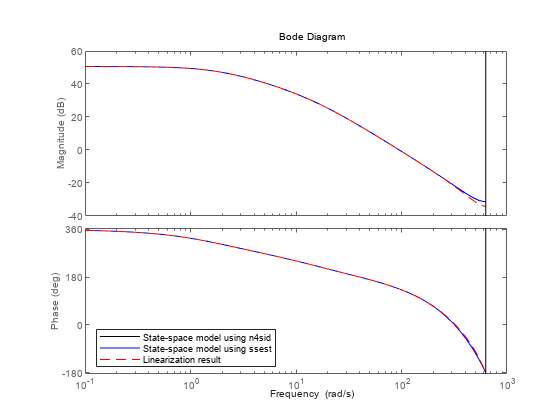
Use Start-Stop Generator and PRBS Signal Generator Blocks for Estimation at Multiple Operating Points
Perform frequency response estimation at multiple operating points using Start-Stop Generator and PRBS Signal Generator blocks.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2024a