绘制化学反应器的线性系统特性
此示例说明如何在仿真期间的特定条件下绘制 Simulink® 模型的线性化图。您可以将 Simulink Control Design™ 软件提供的模块添加到 Simulink 模型中,以在仿真期间对线性系统进行计算和绘图。在此示例中,您将对连续搅拌化学反应器的线性化模型进行计算和绘图。具体来说,您将在反应器模型通过不同工作点时对其进行线性化。
化学反应器模型
打开化学反应器的 Simulink 模型。
open_system('scdcstr')

反应器有三个输入和两个输出。
FeedCon0、FeedTemp0和Coolant Temp模块分别对进料浓度、进料温度和冷却剂温度输入进行建模。CSTR模块的T和CA端口分别对反应器温度和残留浓度输出进行建模。
此示例重点展示当进料浓度和进料温度保持不变时,冷却剂温度 Coolant Temp 对于残留浓度 CA 的响应。
有关反应器建模的详细信息,请参阅 [1]。
绘制反应器线性响应
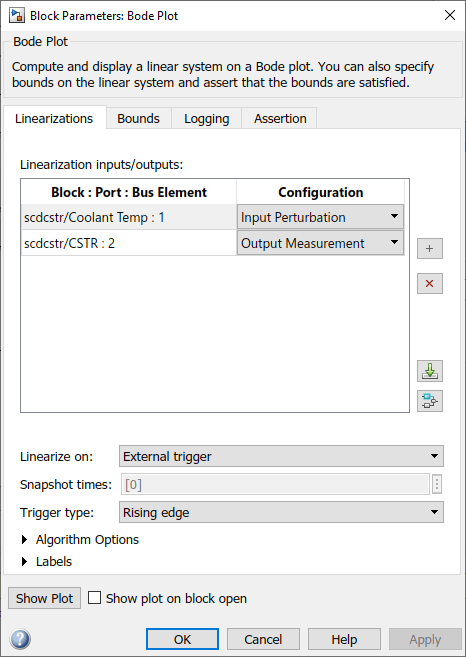
反应器模型包含 Simulink Control Design 的 Linear Analysis Plots 库中提供的一个 Bode Plot 模块。该模块配置为使用:
冷却剂温度
Coolant Temp下的线性化输入残留浓度
CA下的线性化输出
该 Bode Plot 模块配置为在外部触发信号的上升沿执行线性化。当残留浓度满足以下任一条件时,Linearization trigger signal 模块都会计算触发信号并产生上升沿。
处于稳态值 2
在 5 左右的狭窄范围内
处于稳态值 9
要查看 Bode Plot 模块配置,请双击该模块。
要在仿真期间查看模块的波特图,您必须在仿真模型之前打开绘图窗口。为此,请点击显示图。
仿真模型。
sim('scdcstr')
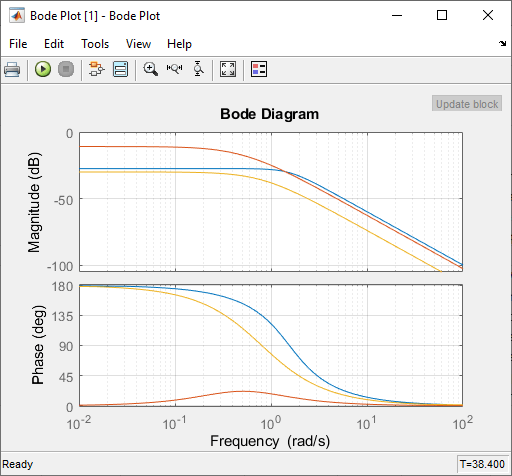
波特图显示对应于由 Linearization trigger signal 模块生成的触发信号的三个工作点处的线性化反应器。
在 5 秒处,线性化是针对低残留浓度。
在 38 秒处,线性化是针对高残留浓度。
在 27 秒处,线性化是针对反应器从低残留浓度到高残留浓度的过渡期。
低残留浓度和高残留浓度下的线性化相似,但过渡期间的线性化具有显著不同的 DC 增益和相位特性。在低频情况下,相位差为 180 度,表示存在不稳定极点或零点。
记录反应器线性响应
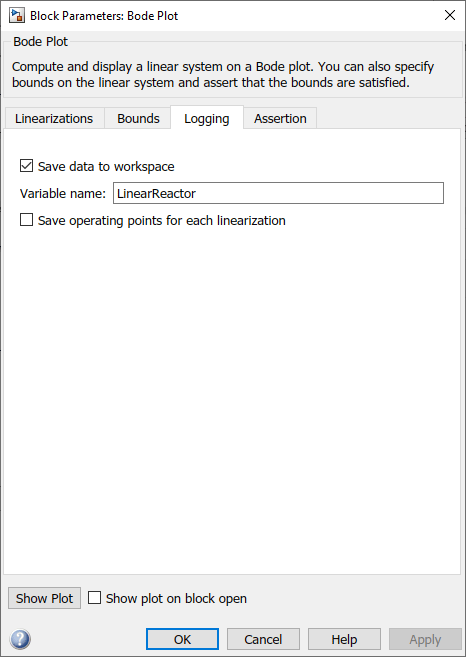
您可以将计算的线性系统保存到模型工作区中。为此,请使用该模块的记录选项卡上的参数。
对于此示例,Bode Plot 模块配置为将 MATLAB® 工作区中计算的响应保存为 LinearReactor 结构体。
LinearReactor
LinearReactor =
struct with fields:
time: [3×1 double]
values: [1×1×3×1 ss]
blockName: 'scdcstr/Bode Plot'
在此结构体中,values 字段存储表示该线性系统的 LTI 状态空间模型数组。有关详细信息,请参阅Model Arrays。线性化的对应仿真时间记录在 time 字段中。
获得计算的线性模型。
P1 = LinearReactor.values(:,:,1); P2 = LinearReactor.values(:,:,2); P3 = LinearReactor.values(:,:,3);
线性系统的波特图在 27 秒处(此时反应器从低残留浓度过渡到高残留浓度)指示系统可能不稳定。为了确认此结果,将以零极点增益格式显示线性系统。
zpk(P1) zpk(P2) zpk(P3)
ans =
From input "Coolant Temp" to output "CSTR/2":
-0.1028
----------------------
(s^2 + 2.215s + 2.415)
Continuous-time zero/pole/gain model.
ans =
From input "Coolant Temp" to output "CSTR/2":
-0.07514
---------------------
(s+0.7567) (s-0.3484)
Continuous-time zero/pole/gain model.
ans =
From input "Coolant Temp" to output "CSTR/2":
-0.020462
---------------------
(s+0.8542) (s+0.7528)
Continuous-time zero/pole/gain model.
关闭 Simulink 模型。
bdclose('scdcstr')
参考
[1] Seborg, Dale, Thomas Edgar, and Duncan Mellichamp.Process Dynamics and Control, Second Edition.John Wiley & Sons, Ltd, 2006.
另请参阅
Bode Plot | Gain and Phase Margin Plot | Linear Step Response Plot | Nichols Plot | Pole-Zero Plot | Singular Value Plot