Design Linear Controllers for Simulink Models
When you have Control System Toolbox™ and Simulink® Control Design™ software, you can perform frequency-domain optimization of Simulink models.
You can use Simulink Control Design software to configure the Control System Designer app with compensators, inputs, outputs, and loops computed from a Simulink model. For more information, see topics in the Interactive and Graphical Tuning (Simulink Control Design) category.
After you configure the Control System Designer app, use Simulink Design Optimization™ software to optimize the controller parameters of the linearized Simulink model. For an example of optimization-based control design for a model linearized using Simulink Control Design software, see Design Optimization-Based PID Controller for Linearized Simulink Model (GUI).
When tuning compensators derived from Simulink Control Design software, the tuning of compensators from a Simulink model is done through the masks of the Simulink blocks representing each compensator.
The following figure shows a controller block mask with a Numerator and Denominator parameterization.
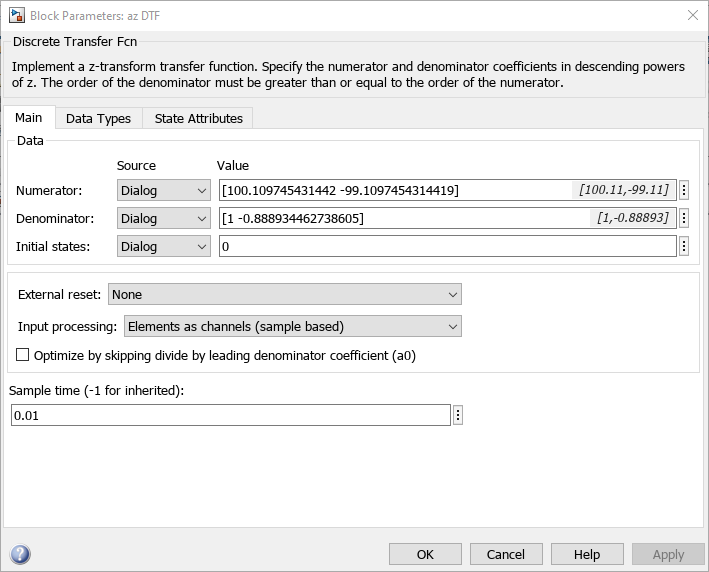
When selecting parameters to optimize, you can tune the compensator in a parameterized format that is consistent with the mask parameters or in a zero/pole/gain format.
To specify parameters to optimize, in Control System Designer, on the Control System tab, select Tuning Methods > Optimization Based Tuning.
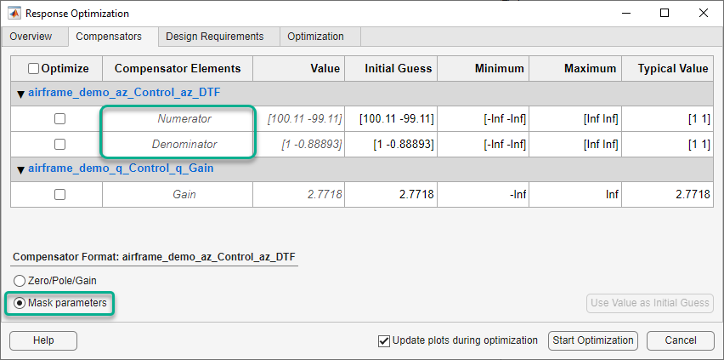
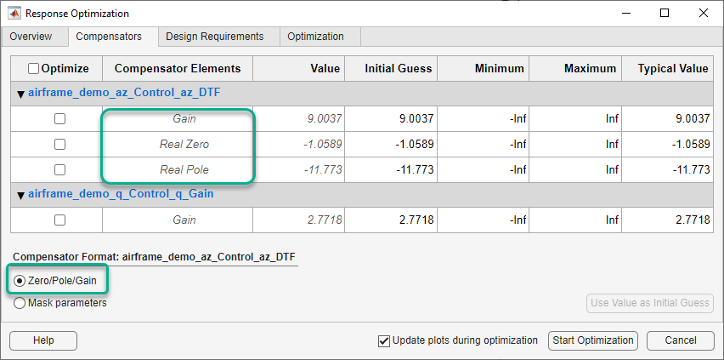
In the Response Optimization dialog box, you can select which block parameterization to use by first clicking on the compensator name. Then, under Compensator Format, select the parameterization to use.
Response Optimization Compensators Tab — Parameterized Format
Response Optimization Compensators Tab — Zero/Pole/Gain Format
Note
You cannot change the compensator format if the compensator is not a Simulink block.