Servo Output
Write to standard servo output channels
Libraries:
Simulink Desktop Real-Time
Description
The Servo Output block sets the shaft position of a standard servo motor.
To rotate the servo shaft, send values to the block input.
Sending out-of-range values to the block input has the same effect as sending the minimum or maximum input values.
The block input inherits the data type of the upstream block.
Examples
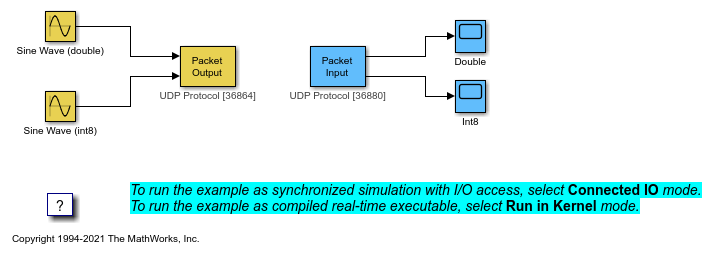
Packet Input/Output
Transfer data through UDP communication protocol using binary encoding.
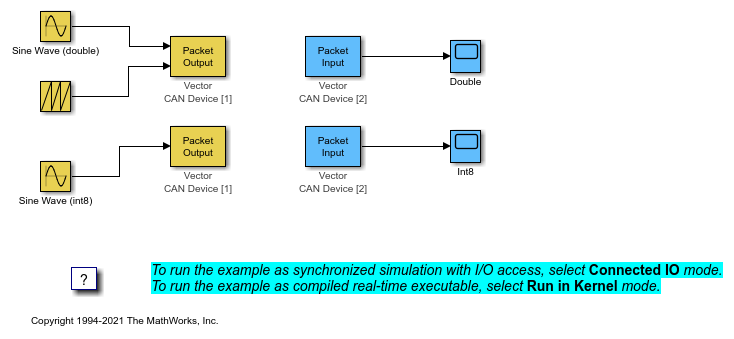
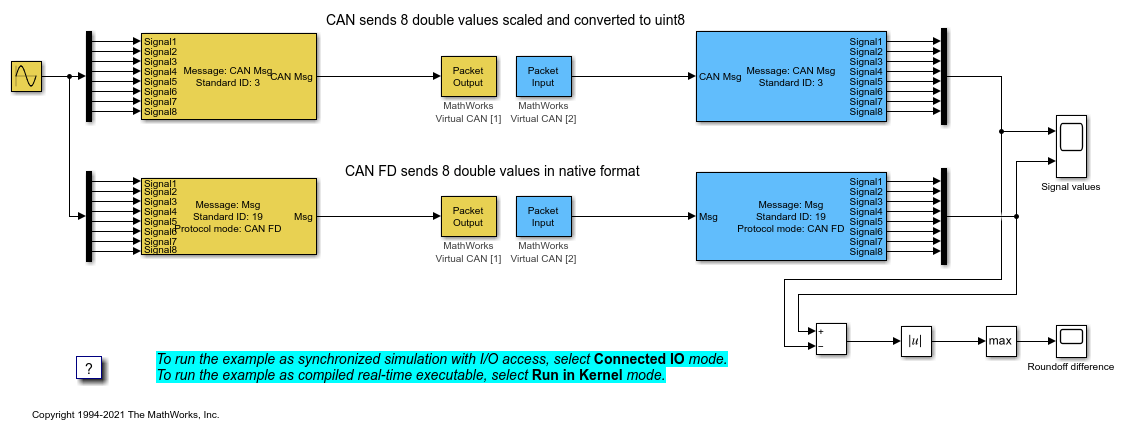
CAN Input/Output with Vehicle Network Toolbox
Transfer data through CAN bus by using the CAN Pack and CAN Unpack blocks available in Vehicle Network Toolbox™ block library.
Ports
Input
Servo position (angle). The minimum and maximum values for shaft position vary with the Block input signal (units) argument value:
Block input signal | Minimum Servo Data | Maximum Servo Data |
|---|---|---|
Degrees (default) |
|
|
Radians |
|
|
Normalized bipolar |
|
|
Normalized unipolar |
|
|
Example: 90
Data Types: double | single | int8 | uint8 | int16 | uint16 | int32 | uint32
Output
In Connected IO mode, returns the number of timer ticks that your model lags behind the real-time kernel. When the model lags by more than Maximum missed ticks, the software reports an error and simulation stops.
Dependency
When you select Show “Missed Ticks” port, this port is visible.
Data Types: double
Parameters
When you click Install new board, the software displays a list of manufacturers of supported boards. When you select a manufacturer, the software displays a list of boards available from that manufacturer. When you select a board, the software adds the board to the list of registered boards and makes that board the current board.
By default, the initial selection in the list of registered boards is <
no board selected >.
For more information about driver support for I/O boards, see Hardware Support from Simulink Desktop Real-Time.
Dependency
When you select a board in the list of registered boards, the Delete current board and Board setup buttons are available.
Programmatic Use
Block Parameter:
DrvName |
To delete the current board, click this button. The initial
selection of the list of registered boards changes to <
no board selected >.
Dependency
To activate this parameter, select a board in the list of registered boards.
When you delete the current board, the Delete current board and Board setup buttons are no longer available.
Programmatic Use
Block Parameter:
DrvName |
To set up the board, click this button.
A board-specific dialog box opens to set up the board. For more information, see the board manufacturer documentation.
Dependency
To activate this parameter, select a board in the list of registered boards.
To deactivate this parameter, click Delete current board.
Programmatic Use
Block Parameter:
DrvAddress |
Block Parameter:
DrvOptions |
Enter a value, in seconds, that represents how frequently you want the block to execute and interact with the I/O hardware. The block synchronizes your model with the real-time clock at this sample rate.
If you are using a fixed-step solver, enter the value that you entered as the Fixed step size configuration parameter or an integer multiple of that value.
Programmatic Use
Block Parameter:
SampleTime |
In Connected IO mode, enter the number of timer ticks that your model can lag behind the real-time kernel. When the model lags behind by this number or fewer timer ticks, the software assumes that the lag is temporary. It allows the model to catch up, even if the model misses some ticks. When the model lags by more than this number, the software reports an error and simulation stops.
In Run in Kernel mode, the software ignores this value.
Programmatic Use
Block
Parameter:
MaxMissedTicks |
In Connected IO mode, select this check box to send the number of missed
ticks to output port Missed Ticks.
In Run in Kernel mode, the Missed Ticks port is
zero.
Programmatic Use
Block Parameter:
ShowMissedTicks |
In Connected IO mode, select this check box to grant other programs more CPU time while the kernel waits for a response from the hardware.
In Run in Kernel mode, the software ignores this value.
Programmatic Use
Block Parameter:
YieldWhenWaiting |
Enter a channel vector that selects the other output channels that you are using on this board. The vector can be any valid MATLAB® vector form. For example, to select the first two other output channels, enter:
[1,2]
or
[1:2]
Programmatic Use
Block Parameter:
Channels |
Select the units of the block input signal that specifies servo position.
Programmatic Use
Block Parameter:
RangeMode |
Select the duration of the control pulse that corresponds to the minimum servo angle. Because not all servos are the same, this parameter lets you calibrate the input signal to the actual servo angle.
Programmatic Use
Block Parameter:
MinPulseDuration |
Select the duration of the control pulse that corresponds to the maximum servo angle. Because not all servos are the same, this parameter lets you calibrate the input signal to the actual servo angle.
Programmatic Use
Block Parameter:
MaxPulseDuration |
Enter the initial value for each output channel that you entered in the Output channels box.
Programmatic Use
Block Parameter:
InitialValue |
Enter the final value for each output channel that you entered in the Output channels box.
Programmatic Use
Block Parameter:
FinalValue |
Version History
Introduced in R2018bIn R2024b, when you enable optional ports, such as Show "Missed Ticks" port, these Simulink® Desktop Real-Time™ block ports appear with labels.
See Also
Topics
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
选择网站
选择网站以获取翻译的可用内容,以及查看当地活动和优惠。根据您的位置,我们建议您选择:。
您也可以从以下列表中选择网站:
如何获得最佳网站性能
选择中国网站(中文或英文)以获得最佳网站性能。其他 MathWorks 国家/地区网站并未针对您所在位置的访问进行优化。
美洲
- América Latina (Español)
- Canada (English)
- United States (English)
欧洲
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)