扩展现有测试套件
此示例说明如何使用 Simulink® Design Verifier™ 扩展现有测试套件以获得缺失模型覆盖率。
您将分析一个示例模型,并生成测试套件以实现全覆盖率。然后修改模型,使测试用例不再实现全覆盖率。最后,使用 Simulink® Design Verifier™ 分析修改后的模型,以获得缺失覆盖率。
生成初始测试套件
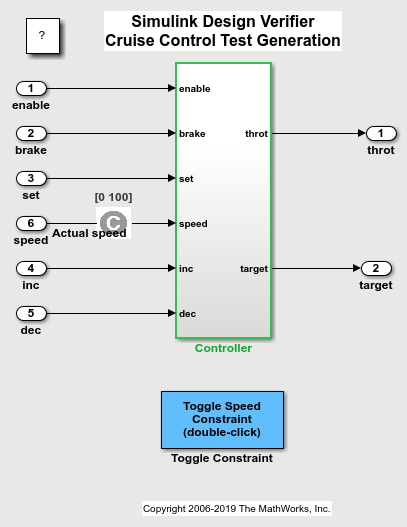
分析 sldvdemo_cruise_control 模型并生成实现全模型覆盖率的测试套件。要分析模型以生成提供模型覆盖率的测试用例,请使用 sldvrun 函数。使用 sldvoptions 设置设计验证参数。
open_system 'sldvdemo_cruise_control'; opts = sldvoptions; opts.Mode = 'TestGeneration'; opts.ModelCoverageObjectives = 'MCDC'; opts.SaveHarnessModel = 'off'; opts.SaveReport = 'off'; [ status, files ] = sldvrun('sldvdemo_cruise_control', opts, true);
测试生成分析结果显示在“Simulink Design Verifier 结果摘要”窗口中。
close_system('sldvdemo_cruise_control',0);
验证完整覆盖率
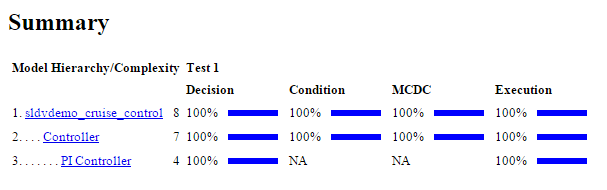
sldvruntest 函数使用现有测试套件来对模型进行仿真。cvhtml 函数生成覆盖率报告,指示 sldvdemo_cruise_control 模型的初始覆盖率。
open_system 'sldvdemo_cruise_control'; [ outData, initialCov ] = sldvruntest('sldvdemo_cruise_control', files.DataFile, [], true); cvhtml('Initial coverage',initialCov); close_system('sldvdemo_cruise_control',0);
修改模型
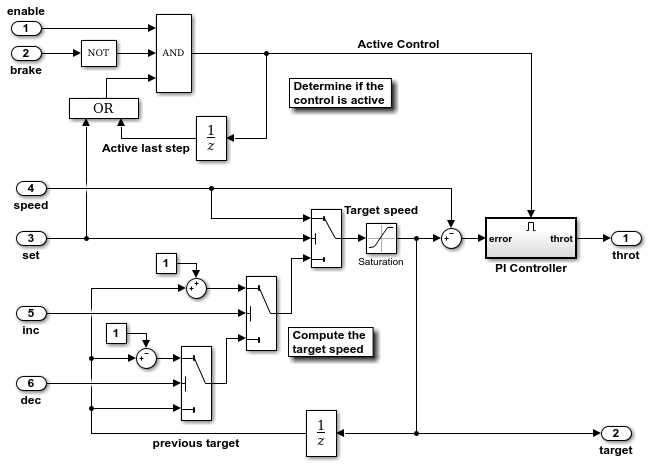
加载修改后的 sldvdemo_cruise_control_mod 模型。通过使用 Saturation 模块,将控制器目标速度值限制为 70。
load_system 'sldvdemo_cruise_control_mod'; load_system 'sldvdemo_cruise_control_mod/Controller';
测量现有测试套件实现的覆盖率
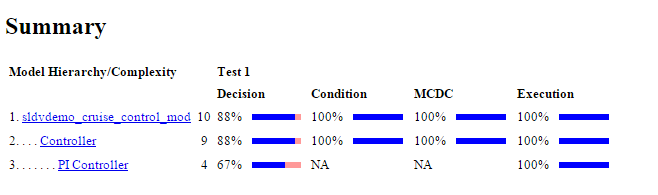
sldvruntest 函数使用现有测试套件和与 sldvdemo_cruise_control 模型相同的输入来对修改后的 sldvdemo_cruise_control_mod 模型进行仿真。cvhtml 函数生成覆盖率报告,指示修改后的 sldvdemo_cruise_control_mod 模型不再实现全覆盖率。
[ outData, startCov ] = sldvruntest('sldvdemo_cruise_control_mod', files.DataFile, [], true); cvhtml('Coverage with the original testsuite',startCov);
扩展现有测试套件
为了实现全模型覆盖率,sldvgencov 函数会分析模型并扩展现有测试套件。
[ status, covData, files ] = sldvgencov('sldvdemo_cruise_control_mod', opts, true, startCov);
验证完整覆盖率
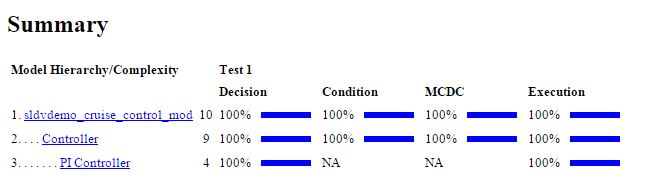
验证新的测试套件是否对修改后的 sldvdemo_cruise_control_mod 模型实现了全覆盖率。sldvruntest 函数使用扩展后的测试套件来对修改后的模型进行仿真。cvhtml 报告显示 sldvdemo_cruise_control_mod 模型实现的总体覆盖率。
[ additionalOut, additionalCov ] = sldvruntest('sldvdemo_cruise_control_mod', files.DataFile, [], true); totalCov = startCov + additionalCov; cvhtml('With additional coverage',totalCov);
要完成示例,请关闭模型。
close_system('sldvdemo_cruise_control_mod');