rmi
使用 Requirements Toolbox 以编程方式工作
语法
说明
获取链接信息
linkedDest = rmi("get",modelOrBlock)modelOrBlock 指定的模型或模型元素的传出链接的链接目标。
numLinks = rmi("count",modelOrBlock)modelOrBlock 指定的顶级模型或模型元素的传出链接数。
descriptions = rmi("descriptions",modelOrBlock)modelOrBlock 指定的模型或模型元素的链接目标的描述。
codeComments = rmi("codeComment",modelOrBlock)modelOrBlock 指定的模型或模型元素链接的需求相对应的代码注释。当您从模型生成代码时,Requirements Toolbox™ 会在生成的代码中插入这些注释。有关详细信息,请参阅将需求追溯到从模型生成的代码。
linkedDest = rmi("codeReqs",modelOrBlock)modelOrBlock 指定的模型或模型元素的需求。如果模型元素是来自 Simulink® 库的模块的引用实例,则链接目标包括来自库模块以及引用模块的链接。如果模型元素不是来自 Simulink 库的模块的引用实例,则该函数的输出与 rmi("get", 的输出相同。有关库模块引用实例的更多信息,请参阅 链接模块 (Simulink)modelOrBlock)
删除链接
rmi("clearAll", 打开一个对话框,提示您从顶级模型或模型元素中删除传出链接。modelOrBlock)
rmi(___,"noPrompt") 删除外部链接而不打开对话框。使用前两种语法之一,后跟参量 noPrompt。
处理模型
[ 为 blockHandles,modelIndices,isSf,objSIDs] = rmi("getObjectsInModel",model)blockHandles 指定的模型中的每个模型元素返回模块句柄 parentIndices、模型层次结构索引 isSf、模型元素是否属于 Stateflow® 图的指示符、objSIDs,以及模型元素 SID model。
[ 返回 modelOrBlockName,modelOrBlockType] = rmi("getObjLabel",modelOrBlock)modelOrBlock 指定的模型或模型元素的名称和类型。
guidChar = rmi("guidGet",modelOrBlock)modelOrBlock 指定的模型或模型元素的全局唯一标识符。如果 modelOrBlock 没有全局唯一标识符,该函数将创建一个。只有 REQ 文件使用全局唯一标识符。
报告可追溯性
rmi("report", 为 artifactToReport)artifactToReport 指定的工件生成 HTML 格式的可追溯性报告。有关可追溯性报告的更多信息,请参阅创建和自定义需求可追溯性报告。
rmi projectReport 为当前工程中的文件生成 HTML 格式的可追溯性报告。此报告的顶层页面包含指向每个具有传出链接的工程文件的报告的链接。有关详细信息,请参阅为工程创建需求可追溯性报告。
与第三方工具集成
rmi register 注册由注册函数 myCustomDocInterfacemyCustomDocInterface 指定的自定义文档接口,使您能够创建指向 Requirements Toolbox 未提供内置支持的第三方应用程序中的需求的直接链接。有关详细信息,请参阅定义自定义文档界面以直接链接到需求。
rmi unregister 取消注册由注册函数 myCustomDocInterfacemyCustomDocInterface 指定的自定义文档接口。有关详细信息,请参阅定义自定义文档界面以直接链接到需求。
rmi httpLink 激活一个内部 HTTP 服务器,您可以使用它从使用 HTTP 协议的基于浏览器的第三方需求工具中的反向链接导航到 MATLAB® 或 Simulink 中的链接项。HTTPS 服务器上的反向链接导航默认处于启用状态。
注意
或者,您可以使用 rmipref 功能并将 UnsecureHttpRequests 首选项设置为 true 来激活内部 HTTP 服务器。当 UnsecureHttpRequests 预设项为 true 时,MATLAB 在启动时激活内部 HTTP 服务器。
connectorStatus = rmi("httpLink","status")0,则服务器未处于活动。
rmi setup 在命令行提示您配置 Requirements Toolbox 以便与 Microsoft® Office 和 IBM® DOORS® 进行交互。有关详细信息,请参阅配置 Requirements Toolbox 以便与 Microsoft Office 和 IBM DOORS 交互。
rmi setup doors 在命令行提示您配置 Requirements Toolbox 以便与 IBM DOORS 交互。有关详细信息,请参阅配置 Requirements Toolbox 以便与 Microsoft Office 和 IBM DOORS 交互。
rmi("doorsSync", 打开 model)model 指定的 IBM 模型的 DOORS Simulink 同步设置对话框。有关 IBM DOORS 同步的更多信息,请参阅 使用替代模块同步 IBM DOORS 中的需求可追溯性。
currentSettings = rmi("doorsSync",model,"settings")model 指定的 IBM 模型的当前 DOORS Simulink 同步设置。要更改设置,请使用 IBM DOORS 同步设置对话框进行更改,然后点击保存设置。
提示
要返回默认设置,请将 model 指定为 []。
rmi("doorsSync", 使用 model,syncSettings)syncSettings 指定的同步设置从 model 指定的 IBM 模型创建 DOORS Simulink 代理模块。如果 IBM DOORS 代理模块已经存在,此函数将重新同步模型和模块并更新代理模块。有关 IBM DOORS 同步的更多信息,请参阅 使用替代模块同步 IBM DOORS 中的需求可追溯性。
numScreenshots = rmi("surrogateUpdateScreenshots",model)
currentTemplate = rmi("getDoorsLabelTemplate")
tf = rmi("setDoorsLabelTemplate",customTemplate)customTemplate 指定的格式并返回成功状态。默认标签模板包含 DOORS 需求链接目标的章节编号和对象标题。
提示
要将链接标签模板恢复为默认模板,请在 MATLAB 命令提示符下输入此代码:
tf = rmi("setDoorsLabelTemplate","")
label = rmi("doorsLabel",moduleID,doorsReqID)doorsReqID 指定的模块中创建指向 moduleID 指定的 IBM DOORS 需求的链接时使用的链接标签。
numUpdatedLinkLabels = rmi("updateDoorsLabels",model)model 指定的模型更新 IBM DOORS 中需求的传出链接的链接标签,并输出更新的链接标签数量。该函数使用当前链接标签模板 currentTemplate。
检查链接的有效性和一致性
validationProblems = rmi("checkDoc")
validationProblems = rmi("checkDoc",docName)docName 指定文档中需求链接的有效性,返回检测到的链接验证问题的数量,并为文档打开链接验证报告。有关详细信息,请参阅验证需求文档中的需求链接。
consistencyProblems = rmi("check",artifactToCheck)artifactToCheck 指定的工件的链接一致性,并为该文件打开链接一致性报告。有关详细信息,请参阅检查直接链接的有效性。
示例
打开 CruiseRequirementsExample 工程。加载 crs_controller 模型。
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
获取 OpMode 子系统的 CruiseControlMode 子系统中 Switch 模块的链接目标。
modelElement = model+"/CruiseControlMode/opMode/Switch"; linkedDest = rmi("get",modelElement)
linkedDest = struct with fields:
doc: 'crs_req_func_spec.slreqx'
id: '25'
linked: 1
description: '#25: Precedence of mode determination'
keywords: ''
reqsys: 'linktype_rmi_slreq'
打开 CruiseRequirementsExample 工程并加载 crs_controller 模型。
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model)
获取具有传出链接的模型元素的模块句柄和 Stateflow® ID。
[blockHandles,sfIDs] = rmi("getHandlesWithRequirements",model);创建一个名为 modelElement 的变量,并将第一个模块句柄分配为该值。
modelElement = blockHandles(1);
从模型元素中获取链接数。
numLinks = rmi("count",modelElement)numLinks = 1
获取链接的链接描述。
desc = rmi("descriptions",modelElement)desc = 1×1 cell array
{'#19: Cruise Control Mode'}
获取与链接需求对应的代码注释。
codeComment = rmi("codeComment",modelElement)codeComment =
'* 1. Cruise Control Mode
* 2. [crs_controllerdic.sldd:brake_threshold] Threshold value for brake pressure
* 3. [crs_controllerdic.sldd:tsp_max] Maximum Target Speed
* 4. [crs_controllerdic.sldd:tsp_min] Minimum Target Speed'
从模型元素中获取 Requirements Toolbox™ 在模型生成的代码中包含的链接的链接目标。
linkedDest = rmi("codeReqs",modelElement)linkedDest=4×1 struct array with fields:
doc
id
linked
description
keywords
reqsys
打开 CruiseRequirementsExample 工程并加载 crs_controller 和 crs_plant 模型。
openProject("CruiseRequirementsExample"); model1 = "crs_controller"; load_system(model1); model2 = "crs_plant"; load_system(model2);
从模型元素中删除链接
获取 crs_controller 模型中具有出站链接的模型元素。
[blockHandles,sfIDs] = rmi("getHandlesWithRequirements",model1);检查第一个模型元素的链接。
modelElement = blockHandles(1);
linkedDest = rmi("get",modelElement)linkedDest = struct with fields:
doc: 'crs_req_func_spec.slreqx'
id: '19'
linked: 1
description: '#19: Cruise Control Mode'
keywords: ''
reqsys: 'linktype_rmi_slreq'
按照提示从第一个模型元素中删除链接。
rmi("clearAll",modelElement)确认您已删除该链接。
linkedDest = rmi("get",modelElement)linkedDest =
[]
检查第二个模型元素的链接。
modelElement = blockHandles(2);
linkedDest = rmi("get",modelElement)linkedDest = struct with fields:
doc: 'crs_req_func_spec.slreqx'
id: '36'
linked: 1
description: '#36: Disabling override'
keywords: ''
reqsys: 'linktype_rmi_slreq'
删除第二个模型元素的链接而不打开对话框。
rmi("clearAll",modelElement,"noprompt")
确认您已删除该链接。
linkedDest = rmi("get",modelElement)linkedDest =
[]
从模型中删除链接
获取 crs_controller 模型中具有出站链接的模型元素。
[blockHandles,~] = rmi("getHandlesWithRequirements",model1)blockHandles = 62×1
103 ×
0.3360
0.3470
0.3630
0.3790
0.3840
0.3890
0.4360
0.4830
0.4880
0.4930
⋮
按照提示从 crs_controller 模型中删除出站链接。
rmi("clearAll",model1,"deep")
确认您已删除链接。
[blockHandles,~] = rmi("getHandlesWithRequirements",model1)blockHandles = 0×1 empty double column vector
获取 crs_plant 模型中具有出站链接的模型元素。
[blockHandles,~] = rmi("getHandlesWithRequirements",model2)blockHandles = 5×1
103 ×
2.1400
2.1420
2.1440
2.1460
2.4080
按照提示从 crs_controller 模型中删除出站链接。
rmi("clearAll",model2,"deep","noprompt")
确认您已删除链接。
[blockHandles,~] = rmi("getHandlesWithRequirements",model2)blockHandles = 0×1 empty double column vector
打开 CruiseRequirementsExample 工程并加载 crs_controller 模型。
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
突出显示具有传出链接的模型元素并打开模型。
rmi("highlightModel",model)
open_system(model);

关闭模型中的突出显示。
rmi("unhighlightModel",model)
打开 CruiseRequirementsExample 工程。加载 crs_controller 模型。
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
获取 enbl 输入端口的全局唯一标识符。
modelElement = model+"/enbl"; guID = rmi("guIDGet",modelElement)
guID = 'GIDa_e2ced317_fc61_4652_8a5e_78ecd1a15a73'
从模型元素的全局唯一标识符获取数字模块句柄。
handle = rmi("guidlookup",model,guID)handle = 155.0002
打开 CruiseRequirementsExample 工程。加载 crs_controller 模型。
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
获取 crs_controller 模型中的对象。
[blockHandles,modelIndices,isSf,objSIDs] = rmi( ... "getObjectsInModel",model);
获取第 13 个模型元素的模块名称和模块类型。
modelElement = blockHandles(13);
[blockName,blockType] = rmi("getObjLabel",modelElement)blockName = 'CruiseControlMode'
blockType = 'SubSystem'
打开 CruiseRequirementsExample 工程。加载 crs_controller 模型。
openProject("CruiseRequirementsExample"); model = "crs_controller"; load_system(model);
为 crs_controller 模型生成可追溯性报告。
rmi("report",model) Beginning report
Looping on model "crs_controller"
Looping on system "CruiseControlMode"
Looping on system "DriverSwRequest"
Looping on system "TargetSpeedThrottle"
Looping on system "disableCaseDetection"
Looping on system "opMode"
Looping on system "outOfRange"
Looping on system "decrement"
Looping on system "doNot Repeat"
Looping on system "increment"
Looping on system "activated"
Looping on system "disabled"
Looping on system "enabled"
Looping on system "targetSpeed"
Looping on system "IsKeyPositionOn"
Looping on system "IsShiftDrive"
Looping on system "isbrake"
Looping on system "IncrementDecrement"
Looping on system "activateCondition"
Looping on system "disableCondition"
Looping on system "enableCondition"
Looping on system "resumeCondition"
Looping on system "counter"
Looping on system "getNewTargetSpeed"
Looping on system "getThrottleValue"
Looping on system "PI controller"
"chapter" contains no content and will not be inserted into document
Converting report
Report complete
生成工程的可追溯性报告。
rmi projectReport Beginning report
Converting report
Report complete
C:\Users\jdoe\CruiseRequirementsExample\data\crs_controllerdic.sldd done.
Beginning report
Looping on model "crs_controller"
Looping on system "CruiseControlMode"
CPPMICROSERVICE WARNING: Empty mw.installpath for bundle: com_mathworks_dastudio_test_blocks
Looping on system "DriverSwRequest"
Looping on system "TargetSpeedThrottle"
Looping on system "disableCaseDetection"
Looping on system "opMode"
Looping on system "outOfRange"
Looping on system "decrement"
Looping on system "doNot Repeat"
Looping on system "increment"
Looping on system "activated"
Looping on system "disabled"
Looping on system "enabled"
Looping on system "targetSpeed"
Looping on system "IsKeyPositionOn"
Looping on system "IsShiftDrive"
Looping on system "isbrake"
Looping on system "IncrementDecrement"
Looping on system "activateCondition"
Looping on system "disableCondition"
Looping on system "enableCondition"
Looping on system "resumeCondition"
Looping on system "counter"
Looping on system "getNewTargetSpeed"
Looping on system "getThrottleValue"
Looping on system "PI controller"
"chapter" contains no content and will not be inserted into document
Converting report
Report complete
C:\Users\jdoe\CruiseRequirementsExample\models\crs_controller.slx done.
Beginning report
Looping on model "crs_plant"
Looping on system "crs_plant"
Looping on system "Vehicle1"
Looping on chart "shift_logic"
Looping on and state "gear_state"
Looping on and state "selection_state"
Looping on or state "fourth"
Looping on or state "third"
Looping on or state "second"
Looping on or state "first"
Looping on or state "steady_state"
Looping on or state "upshifting"
Looping on or state "downshifting"
"chapter" contains no content and will not be inserted into document
Converting report
Report complete
C:\Users\jdoe\CruiseRequirementsExample\models\crs_plant.slx done.
Beginning report
Running FOR loop, RPTGEN_LOOP = 1
Converting report
Report complete
C:\Users\jdoe\CruiseRequirementsExample\tests\DriverSwRequest_Tests.mldatx done.
Beginning report
"chapter" contains no content and will not be inserted into document
Converting report
Report complete
注册一个自定义文档界面,能够直接链接到 Microsoft® PowerPoint® 演示文稿中的需求。
rmi register customPowerPointInterface
取消注册接口。
rmi unregister customPowerPointInterface
获取内部 HTTP 服务器状态。
status = rmi("httpLink","status")
status = struct with fields:
httpPort: 0
httpsPort: 31515
激活内部 HTTP 服务器。
rmi httpLink获取内部 HTTP 服务器状态。
status = rmi("httpLink","status")
status = struct with fields:
httpPort: 31415
httpsPort: 31515
配置 Requirements Toolbox 以便与 Microsoft Office 和 IBM DOORS 进行交互。
rmi setupEnsuring required Active-X controls ..
Verifying MATLAB automation server path ..
Register this MATLAB installation as ActiveX Automation Server? (Y/N):_y
Registering this MATLAB executable as an automation server ..
Welcome to the DOORS-MATLAB Interface setup utility.
This will perform all the steps necessary so that you
can start using Simulink and Stateflow with IBM DOORS.
NOTE: You should close IBM DOORS before continuing with
this installation.
Checking Windows Registry to locate IBM DOORS installation(s)...
Please select IBM DOORS installation to configure for MATLAB:
[1] 9.6 C:\Program Files\IBM\Rational\DOORS\9.6\
If your target IBM DOORS Client installation is not listed above,
select one of the following options:
[2] Manually enter IBM DOORS installation directory
[3] Exit, making no changes
[4] Make no changes in IBM DOORS directory but ensure IBM DOORS integration is enabled in MATLAB
Selection: 1
C:\Program Files\IBM\Rational\DOORS\9.6\lib\dxl\addins\dmi\dmi.inc is up to date.通过执行以下代码配置 Requirements Toolbox™ 以与 IBM DOORS 交互:
rmi setup doors
开放 DOORS 工程
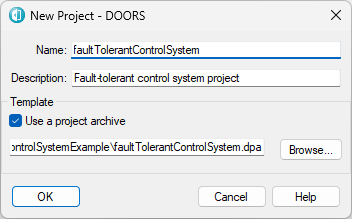
在此示例中,您使用 IBM DOORS 中的 faultTolerantControlSystem.dpa 文件,其中包含描述容错控制系统的需求模块。
在 IBM DOORS 中,创建一个新工程:
选择文件 > 新建 > 工程。
在新建工程对话框中,将名称设置为
faultTolerantControlSystem。在描述字段中,输入
Fault-tolerant control system project。选择使用工程存档。
点击浏览并选择
faultTolerantControlSystem.dpa。点击确定创建工程。
获取同步设置
打开 faultTolerantControlSystem 模型。
model = "faultTolerantControlSystem";获取模型的当前同步设置。
currentSettings = rmi("doorsSync",model,"settings")
currentSettings = struct with fields:
surrogatePath: '/faultTolerantControlSystem/faultTolerantControlSystem'
detailLevel: 4
doorsToSl: 0
slToDoors: 1
purgeSimulink: 0
purgeDoors: 1
saveModel: 1
saveSurrogate: 1
将 detailLevel 字段的值设置为 4。
currentSettings.detailLevel = 4;
创建代理模块
创建代理模块。
rmi("doorsSync",model,currentSettings)Verifying MATLAB automation server path .. Registering this MATLAB executable as an automation server ..
将屏幕截图添加到模型中。
numScreenshots = rmi("surrogateUpdateScreenshots",model) Beginning report
Looping on system "faultTolerantControlSystem"
Looping on system "engine gas dynamics"
Looping on system "Mixing & Combustion"
Looping on system "system lag"
Looping on system "Throttle & Manifold"
Looping on system "Intake Manifold"
Looping on system "Throttle"
Looping on system "fuel rate controller"
Looping on system "Airflow calculation"
Looping on system "Fuel Calculation"
Looping on system "Switchable Compensation"
Looping on system "LOW Mode"
Looping on system "RICH Mode"
Looping on system "Sensor correction and Fault Redundancy"
Looping on system "MAP Estimate"
Looping on system "Speed Estimate"
Looping on system "Throttle Estimate"
Looping on chart "control logic"
Converting report
Report complete
Using ./snapshots_html_files/image-001-sl.png for faultTolerantControlSystem
Missing screenshot for faultTolerantControlSystem/Test inputs
Using ./snapshots_html_files/image-003-sl.png for faultTolerantControlSystem/engine
gas
dynamics
Using ./snapshots_html_files/image-005-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Mixing & Combustion
Using ./snapshots_html_files/image-007-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Mixing & Combustion/system lag
Using ./snapshots_html_files/image-009-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Throttle & Manifold
Using ./snapshots_html_files/image-011-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Throttle & Manifold/Intake Manifold
Using ./snapshots_html_files/image-013-sl.png for faultTolerantControlSystem/engine
gas
dynamics/Throttle & Manifold/Throttle
Using ./snapshots_html_files/image-015-sl.png for faultTolerantControlSystem/fuel rate
controller
Using ./snapshots_html_files/image-017-sl.png for faultTolerantControlSystem/fuel rate
controller/Airflow calculation
Using ./snapshots_html_files/image-019-sl.png for faultTolerantControlSystem/fuel rate
controller/Fuel Calculation
Using ./snapshots_html_files/image-021-sl.png for faultTolerantControlSystem/fuel rate
controller/Fuel Calculation/Switchable
Compensation
Using ./snapshots_html_files/image-023-sl.png for faultTolerantControlSystem/fuel rate
controller/Fuel Calculation/Switchable
Compensation/LOW Mode
Using ./snapshots_html_files/image-025-sl.png for faultTolerantControlSystem/fuel rate
controller/Fuel Calculation/Switchable
Compensation/RICH Mode
Using ./snapshots_html_files/image-027-sl.png for faultTolerantControlSystem/fuel rate
controller/Sensor correction and
Fault Redundancy
Using ./snapshots_html_files/image-029-sl.png for faultTolerantControlSystem/fuel rate
controller/Sensor correction and
Fault Redundancy/MAP Estimate
Using ./snapshots_html_files/image-031-sl.png for faultTolerantControlSystem/fuel rate
controller/Sensor correction and
Fault Redundancy/Speed Estimate
Using ./snapshots_html_files/image-033-sl.png for faultTolerantControlSystem/fuel rate
controller/Sensor correction and
Fault Redundancy/Throttle Estimate
Using ./snapshots_html_files/image-035-sf.png for faultTolerantControlSystem/fuel rate
controller/control logic
Processed 19 subsystems, 0 items added in module 0000010e
numScreenshots = 19
加载 faultTolerantControlSystem 模型。
model = "faultTolerantControlSystem";
load_system(model)打开模型的 IBM DOORS 同步设置对话框。
rmi("doorsSync",model)通过执行以下代码配置 Requirements Toolbox™ 以与 IBM® DOORS® 交互:
rmi setup doors
加载 slvnvdemo_fuelsys_doorsreq 模型。获取模型的链接集的句柄。
model = "slvnvdemo_fuelsys_doorsreq";
load_system(model);
myLinkSet = slreq.load(model);开放 DOORS 工程
在此示例中,您使用 IBM DOORS 中的 faultTolerantControlSystem.dpa 文件,其中包含描述容错控制系统的需求模块。
在 IBM DOORS 中,创建一个新工程:
选择文件 > 新建 > 工程。
在新建工程对话框中,将名称设置为
faultTolerantControlSystem。在描述字段中,输入
Fault-tolerant control system project。选择使用工程存档。
点击浏览并选择
faultTolerantControlSystem.dpa。点击确定创建工程。

重定向 DOORS 工程的链接
将链接重定向至新工程中的 IBM DOORS 模块 ID。
在 IBM DOORS 中,打开 faultTolerantControlSystem 工程。

打开 faultTolerantControlSystem 模块并选择一个需求。获取需求的模块 ID。更新链接目标以指向新工程中的 faultTolerantControlSystem 模块。
newModuleID = rmidoors.getCurrentObj;
oldModuleID = "00000160";
count = updateDocUri(myLinkSet,oldModuleID,newModuleID)count = 235
打开 FuelSys Design Description 模块并选择一个需求。获取需求的模块 ID。更新链接目标以指向新工程中的 FuelSys Design Description 模块。
newModuleID = rmidoors.getCurrentObj;
oldModuleID = "00000161";
count = updateDocUri(myLinkSet,oldModuleID,newModuleID)count = 6
打开 FuelSys Requirements Specification 模块并选择一个需求。获取需求的模块 ID。更新链接目标以指向新工程中的 FuelSys Requirements Specification 模块。
newModuleID = rmidoors.getCurrentObj;
oldModuleID = "00000141";
count = updateDocUri(myLinkSet,oldModuleID,newModuleID)count = 1
获取并设置链接标签模板
获取 IBM DOORS 中需求链接的当前标签模板。
currentTemplate = rmi("getDoorsLabelTemplate")currentTemplate = '%M:%h'
设置模板显示模块名称和对象标题,以冒号分隔。
customTemplate = "%M:%h"; tf = rmi("setDoorsLabelTemplate",customTemplate)
tf = logical
0
确认您已更新链接标签模板。
currentTemplate = rmi("getDoorsLabelTemplate")currentTemplate = '%M:%h'
更新链接标签
根据当前模板获取 27 模块中需求编号 FuelSys Requirements Specification 的链接标签。
doorsReqID = "27"; newModuleID = "00000101"; label = rmi("doorsLabel",newModuleID,doorsReqID)
label = 'FuelSys Requirements Specification:Normal Mode of Operation'
加载 slvnvdemo_fuelsys_doorsreq 模型,然后更新从模型到 IBM DOORS 中的需求的传出链接的链接标签。
model = "slvnvdemo_fuelsys_doorsreq"; load_system(model); numUpdatedLinks = rmi("updateDoorsLabels",model)
slvnvdemo_fuelsys_doorsreq/fuel rate controller/throttle (Inport):
changing "1.1.1.1 Throttle Sensor" to "FuelSys Design Description:Throttle Sensor"
slvnvdemo_fuelsys_doorsreq/fuel rate controller/MAP (Inport):
changing "1.1.1.2 Manifold Absolute Pressure Sensor " to "FuelSys Design Description:Manifold Absolute Pressure Sensor"
slvnvdemo_fuelsys_doorsreq/fuel rate controller/Airflow calculation (SubSystem):
changing "1.2.1 Mass airflow estimation " to "FuelSys Design Description:Mass airflow estimation"
slvnvdemo_fuelsys_doorsreq/.../Sensor correction and Fault Redundancy/MAP Estimate (SubSystem):
changing "1.3.1.3 Manifold pressure failure mode " to "FuelSys Design Description:Manifold pressure failure mode"
slvnvdemo_fuelsys_doorsreq/.../Sensor correction and Fault Redundancy/Speed Estimate (SubSystem):
changing "2.2.6 Speed Sensor Failure" to "FuelSys Requirements Specification:Speed Sensor Failure"
slvnvdemo_fuelsys_doorsreq/.../control logic/Rich_Mixture (State):
changing "1.3.1.2 Enriched mixture usage " to "FuelSys Design Description:Enriched mixture usage"
slvnvdemo_fuelsys_doorsreq/.../control logic/[speed==0 & press < zero_thresh]/ Fail.INC (Transition):
changing "1.3.1.4 Speed sensor failure detection " to "FuelSys Design Description:Speed sensor failure detection"
numUpdatedLinks = 7
此示例显示如何以交互方式检查链接的有效性。
注意
您只能在 Windows® 平台上运行此示例。
打开从 Simulink 模块链接并导航到 Excel 中的需求示例。
openExample(['slrequirements/' ... 'LinkRequirementsInExcelToSimulinkBlocksExample'])
打开 slvnvdemo_FuelSys_TestScenarios Microsoft Excel 文档。
doc = which("slvnvdemo_FuelSys_TestScenarios.xlsx");
winopen(doc);检查文档链接的有效性。按照命令行窗口中的提示进行操作。
validationProblems = rmi("checkDoc")Please choose target document type:
1 - Microsoft Word document
2 - Microsoft Excel document
3 - DOORS module
[1,2,3]? 2
Microsoft Excel document to check: (current)
Checking 'C:/Users/jdoe/MATLAB/slrequirements-ex78700367/slvnvdemo_FuelSys_TestScenarios.xlsx' (Y/n) ? y
Reading "C:/Users/jdoe/MATLAB/slrequirements-ex78700367/slvnvdemo_FuelSys_TestScenarios.xlsx" ...
found 2 links
validationProblems =
1打开 slvnvdemo_FuelSys_TestScenarios Microsoft® Excel® 文档。
doc = which("slvnvdemo_FuelSys_TestScenarios.xlsx");
winopen(doc);检查链接的有效性。
validationProblems = rmi("checkDoc",doc)Reading "C:/Users/jdoe/MATLAB/slrequirements-ex78700367/slvnvdemo_FuelSys_TestScenarios.xlsx" ... found 2 links
validationProblems = 1
打开 ShortestPath 示例。
openProject("ShortestPath");检查来自 shortest_path MATLAB® 代码文件的链接是否一致。
artifactToCheck = "shortest_path.m"; consistencyProblems = rmi("check",artifactToCheck)
consistencyProblems = 4×1
0
0
11
0
输入参数
输出参量
备选方法
getSimulinkBlockHandle(Simulink) 函数返回模块的数字句柄,并且不需要此语法所需的全局唯一标识符:handle = rmi("guidLookup",model,guid)要生成需求集的报告,您可以使用
slreq.generateReport函数。有关详细信息,请参阅报告需求信息。该报告是rmi("report",artifactToReport)和rmi projectReport生成的可追溯性报告的替代方案。