simscape.multibody.BushingJoint Class
Namespace: simscape.multibody
Superclasses: simscape.multibody.Joint
Description
Use an object of the simscape.multibody.BushingJoint class to construct a
bushing joint. You can envision a bushing joint as a Cartesian joint followed by a gimbal
joint. The follower frame can have an arbitrary rigid transformation with respect to the base
frame. The transformation contains three sequential translations and three sequential
rotations, as shown in the image.
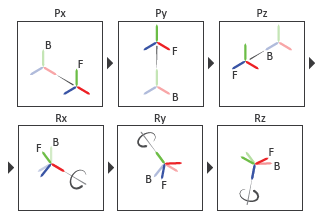
The translations are along the x, y, and z axes of the follower frame, respectively. Before the first rotation, the axes of the follower frame are parallel to the corresponding axes of the base frame. The rotations are about the x, y, and z axes of the follower frame.
Similar to the gimbal joint, the bushing joint has a kinematic singularity. See simscape.multibody.GimbalJoint for more details.
Class Attributes
Sealed | true |
ConstructOnLoad | true |
RestrictsSubclassing | true |
For information on class attributes, see Class Attributes.
Creation
Description
bj = simscape.multibody.BushingJoint
Properties
Version History
Introduced in R2022a