smexportonshape
Export a CAD assembly model from Onshape
Syntax
Description
multibodyDescriptionFile = smexportonshape(assemblyURL)
The assemblyURL argument is the web address
of the Onshape assembly model to export. To obtain the web address,
open the Onshape model, select the assembly tab, and copy the
URL shown on your web browser.
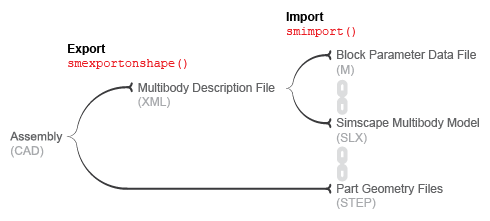
The generated files include an XML multibody description file and a set of STEP files. The XML file identifies the bodies that comprise the model and defines their kinematic relationships. The STEP files provide the 3-D geometries of the bodies. By default, all files are stored in the current MATLAB® folder.
The multibodyDescriptionFile output is the name of the XML multibody
description file. You must use the smimport function with multibodyDescriptionFile as input
argument to import the Onshape model into the Simscape
Multibody environment. The figure shows the export and import stages of the Onshape CAD translation workflow.
You must have an active Onshape account. The first time you use this function, you must give the Simscape Multibody Exporter access privileges to your Onshape account. The function uses these privileges strictly to access and export your Onshape models. Onshape software grants the function access via Javascript tokens that keep your login credentials and any user information secure and visible only to you.
To obtain the access tokens for your account, Simscape
Multibody software
requires you to log in to your Onshape account once per MATLAB session.
A secure Onshape log-in page opens automatically on the first
use of the smexportonshape function of a MATLAB session.
You can revoke the access privileges granted to the Simscape
Multibody Exporter
at any time. You must, however, restore those privileges if you want
to export additional Onshape models. If you revoke the access
privileges, then on your next use of smexportonshape an Onshape web
page opens prompting you to accept or reject a request to restore
those privileges.
multibodyDescriptionFile = smexportonshape(assemblyURL,Name=Value)
Examples
This example shows how to export an Onshape model for Simscape Multibody.
Create a variable named
urlto store the URL of a humanoid robot assembly created in Onshape.url = "https://cad.onshape.com/documents/5817806f96eae5105bfa5085/w/15ab3bfb58cacbf427d77ff3/e/181493813f84966648a8db1b";Export the humanoid robot model.
Use the
smexportonshapefunction to export the model and save the multibody description file.xmlFile = smexportonshape(url);
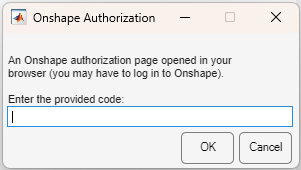
During export, an Onshape authorization page opens in your browser. Log in to Onshape if prompted, and copy the authorization code.
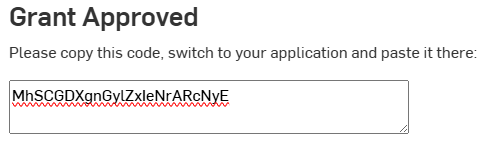
If you are already logged in, you are either authorized automatically or redirected to the authorization code page without needing to enter your credentials again.
Paste the authorization code into the application window and click OK to proceed.
Import the exported XML file using
smimport.smimport(xmlFile);
Visualize and adjust the model.
Update the model. Multibody Explorer displays a static visualization of the model in its initial configuration that matches the pose at export.
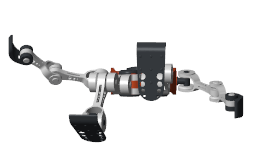
Note that the vertical axis of the robot (
+Y) differs from the default vertical axis used in the Multibody Explorer visualization pane (+Z). To correct orientation, in the Multibody Explorer toolstrip, on the Setup section, selectY Up (XY Front). To apply the new view convention, on the Views tab, select the Iso view.
Export an Onshape model of a humanoid robot assembly into a specific folder using the
smexportonshape function.
Store the URL of the Onshape model in a MATLAB variable named
urland the folder in which to save the model in a variable namedfolder. You must create the folder shown or replace that folder with one to which you have write privileges.url = "https://cad.onshape.com/documents/5817806f96eae5105bfa5085/w/15ab3bfb58cacbf427d77ff3/e/181493813f84966648a8db1b"; folder = "C:\Documents\Export"
Export the humanoid robot model using the
smexportonshapefunction. Use theFolderPathname-value pair argument to specify the export folder.xmlFile = smexportonshape(url,FolderPath=folder);
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2017a