smimport
Import a CAD, URDF, or Robotics System Toolbox model
Description
[ creates a Simscape™
Multibody™ model from a CAD, URDF, or Robotics System Toolbox™ model.H,dataFileName]
= smimport(modelSource)
modelSource is the name of the file or object for import. Use
XML files for CAD models, URDF files for URDF models, and rigidBodyTree (Robotics System Toolbox) objects for
Robotics System Toolbox models. XML files must conform to the Simscape Multibody XML schema, and URDF files must conform to the Supported URDF Elements and Attributes.
A Robotics System Toolbox license is required to create rigidBodyTree
objects.
H is the model handle, and dataFileName
is the name of the supporting file that, in imported CAD models, stores the numeric
values of block parameters—in a structure array populated with MATLAB variables
referenced in the blocks. The data file provides a mechanism to update the imported
model if the CAD model changes. Models imported from URDF files or
rigidBodyTree objects do not rely on data files for block
parameters.
XML files can come from different sources. For example, the smexportonshape function converts Onshape® CAD models into XML files. The Simscape
Multibody Link plug-in is able to convert Autodesk Inventor®, PTC®, and SolidWorks® CAD models into XML files. For other CAD applications and multibody
modeling tools, the Simscape
Multibody XML schema makes it possible to create a custom model export
app.
CAD, URDF, and rigidBodyTree models all share the same components.
These are (i) rigid bodies, also known as parts in CAD models and links in URDF
models, and (ii) kinematic constraints, packaged, in some cases, as joints. Rigid
bodies import as Simulink® subsystems with solid and Rigid
Transform blocks. Constraints map into joint, gear, and other
constraint blocks.
URDF models contain <link> elements which in turn contain
<joint> elements. Likewise, rigidBodyTree
objects contain rigidBody objects and
rigidBodyJoint objects. In the created Simscape
Multibody model, joints become siblings to rigid bodies and features that not
inside rigid body subsystems but alongside them. Joint limits and home positions
persist, the later as position state targets, in the appropriate joint
blocks.
Note
Joint limits are imported from URDF and rigidBodyTree
models but not from CAD models. Reproduce the joint limits of CAD models
manually if you must—by enabling joint limits in the joint blocks and
setting the limit positions to appropriate values.
___ = smimport(___,Name,Value)
creates a Simscape
Multibody model from a CAD, URDF, or Robotics System Toolbox model with custom name or regenerates the data file of a previously
imported CAD model. Most name-value pair arguments apply only to CAD models. Use
ImportMode to regenerate parameter data files and
PriorDataFile to catch inadvertent changes to the model,
such as the removal of a part or a change in its name.
Examples
This example shows how to create a model by importing an XML file.
To add the XML and the corresponding geometry files to the path for the current MATLAB® session, at the MATLAB command prompt, enter:
openExample("sm/ImportedCADModelExample"); addpath(genpath("ImportedCADModelSupport"));
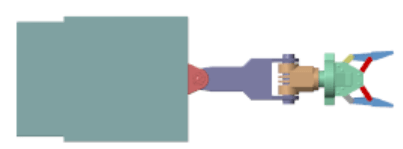
Import a CAD Model with Default Name
To import the model and store it in memory with default name, at the MATLAB command prompt, enter:
smimport("sm_robot");
As the model is in XML format, you can omit the file extension. The blocks in the generated model are parameterized in terms of MATLAB variables. The numerical values of these variables are defined in a data file that is named sm_robot_DataFile.m and stored in the same active folder as the generated model.
Import a CAD Model with Custom Name
Alternatively, you can import the CAD model with a custom name, such as robotto. The data file is robottos_data_file.m.
smimport("sm_robot","ModelName","robotto",... "DataFileName","robottos_DataFile");
Update an Imported CAD Model
Regenerate the data file for the imported CAD model of the robotic arm. To avoid overwriting the original data file, name the new file robottos_new_DataFile.
smimport('sm_robot','ImportMode','dataFile','DataFileName',... 'robottos_new_DataFile','PriorDataFile','robottos_DataFile');
Point the imported model to the new data file and reinitialize the model workspace.
hws = get_param(bdroot,'modelworkspace'); hws.DataSource = 'MATLAB File'; hws.FileName = 'robottos_new_DataFile'; hws.reload
To do the same using Model Explorer, first, select MODELING > DESIGN > Model Workspace to open the Model Explorer. Next, in the Model Hierarchy of the Model Explorer, left click Model Workspace. In the Model Workspace pane, enter robottos_new_DataFile.m in the File Name parameter and click Reinitialize from Source button to apply the change.
You can import a URDF model into the Simscape™ Multibody™ environment. The import process occurs in a single step based on the smimport function. The smimport function converts the URDF model directly into an equivalent Simscape Multibody model.
Example Overview
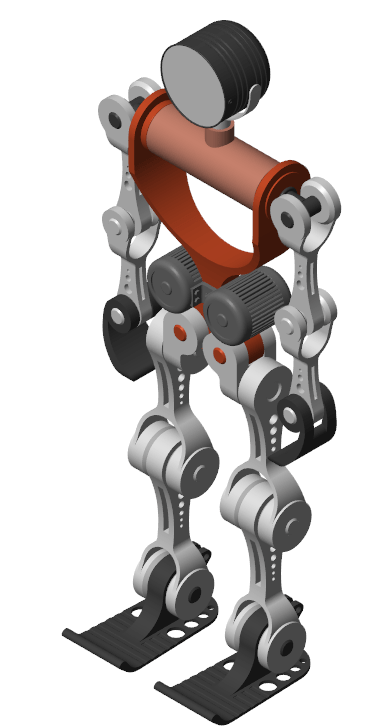
This example shows how to import an Onshape® model of a humanoid robot assembly. The model comprises various parts (”links” in URDF jargon) representing the torso, head, and limbs of the robot. The parts connect through revolute and weld joints (”continuous” and “fixed” respectively).
Import the Model
To add the URDF file to the search path for the current MATLAB® session, enter:
openExample("sm/DocImportedURDFModelExample"); addpath(genpath("ImportedURDFSupport"));
Import the URDF model:
smimport("Humanoid.urdf")
The function generates a Simscape Multibody model of the humanoid robot. The file extension is required to identify the import file as URDF. Update the imported model (in the Modeling tab, click Update Model.) to open a static visualization in the initial state. The figure shows the results.
Build on the model, for example, by adding control systems to actuate the various joints. For a controlled example, at the MATLAB command prompt enter:
openExample("sm/ImportedURDFExample")
Simulate the model to view a simple animation.
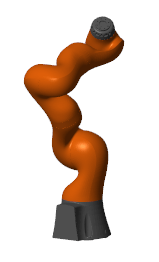
Import a rigidBodyTree object for an LBR iiwa
serial manipulator. The model is a part of the Robotics System Toolbox installation and a URDF model named
iiwa14.urdf.
Convert the URDF model into a rigidBodyTree object.
iiwaRBT = importrobot('iiwa14.urdf');Note
A Robotics System Toolbox license is required to run importrobot (Robotics System Toolbox).
Import the iiwaRBT object into Simscape
Multibody.
iiwaSM = smimport(iiwaRBT);
Update the diagram to visualize the model in its initial configuration using Multibody Explorer. In the Simulation section, click the Update Model button.
Note
Not all robot models from the Robot Library include mesh files. To gain the source mesh data for all the robot models and properly import the models to Simscape Multibody, download and install the Robotics System Toolbox Robot Library Data support package. For more information, see Install Robotics System Toolbox Robot Library Data Support Package (Robotics System Toolbox).
Input Arguments
Name-Value Arguments
Output Arguments
Version History
Introduced in R2012b
See Also
smexportonshape | importrobot (Robotics System Toolbox)