Mechanisms
Simscape™ Multibody™ provides tools for modeling, designing, and analyzing various mechanisms such as linkages and pulleys.
Featured Examples

Elevator
Models an elevator system in Simscape™ Multibody™. The system is comprised of belt-cable pulley circuits which control the movement of the elevator and the door mechanism. The cable is approximated to be extensible by using high stiffness springs between the belt cable ends and the elevator. The motor pulley is motion actuated based on the necessary elevator kinematics computed from the Floor Number inputs. Effects of people entering and leaving the elevator are modeled using general variable mass blocks.
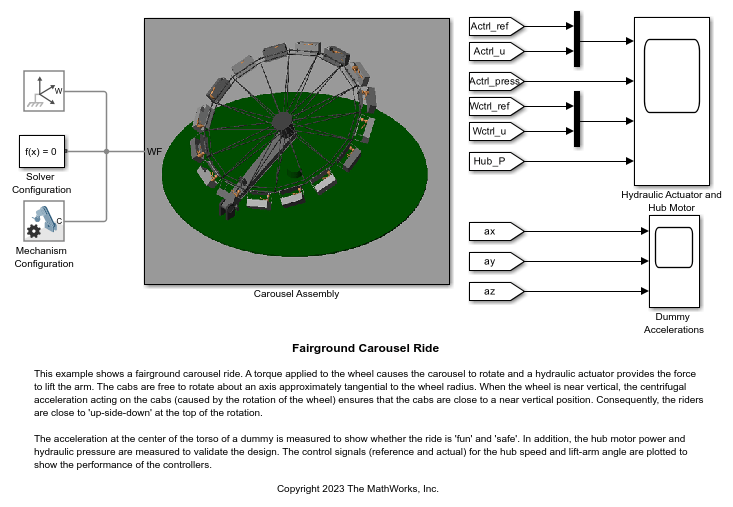
Fairground Carousel Ride
A fairground carousel ride. A torque applied to the wheel causes the carousel to rotate and a hydraulic actuator provides the force to lift the arm. The cabs are free to rotate about an axis approximately tangential to the wheel radius. When the wheel is near vertical, the centrifugal acceleration acting on the cabs (caused by the rotation of the wheel) ensures that the cabs are close to a near vertical position. Consequently, the riders are close to 'up-side-down' at the top of the rotation.
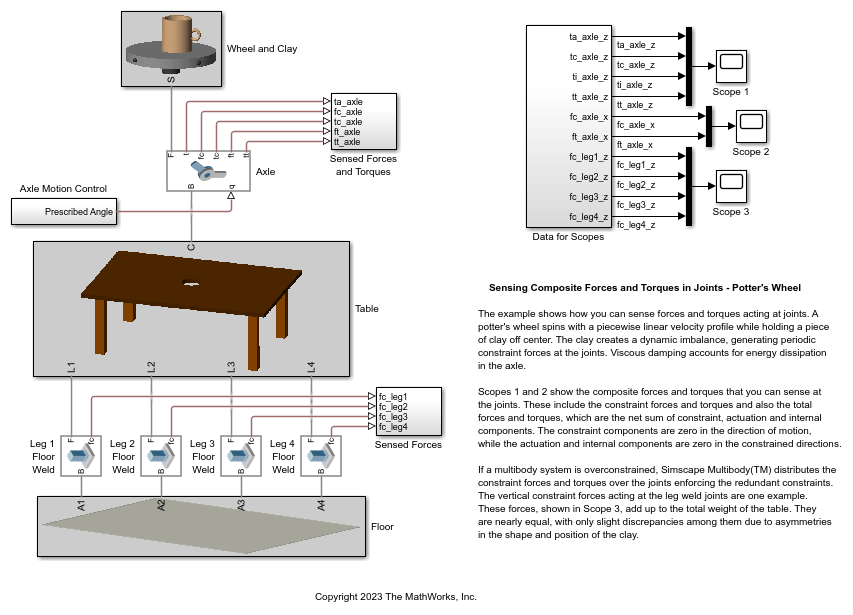
Sensing Composite Forces and Torques in Joints - Potter's Wheel
The example shows how you can sense forces and torques acting at joints. A potter's wheel spins with a piecewise linear velocity profile while holding a piece of clay off center. The clay creates a dynamic imbalance, generating periodic constraint forces at the joints. Viscous damping accounts for energy dissipation in the axle.

Using the Worm and Gear Constraint Block - Solar Tracker
Illustrates the use of the Worm and Gear Constraint block to model a solar tracker. A slew drive containing a worm and gear constraint powers the yaw rotation of the solar trackers. The worm and gear geometry gives a large reduction in a single stage of gearing which provides precision tracking and high torque output. The yaw rotation is specified as a motion input to the gear revolute joint and the necessary actuator torque is automatically computed at the worm revolute joint.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)
Asia Pacific
- Australia (English)
- India (English)
- New Zealand (English)
- 中国
- 日本Japanese (日本語)
- 한국Korean (한국어)