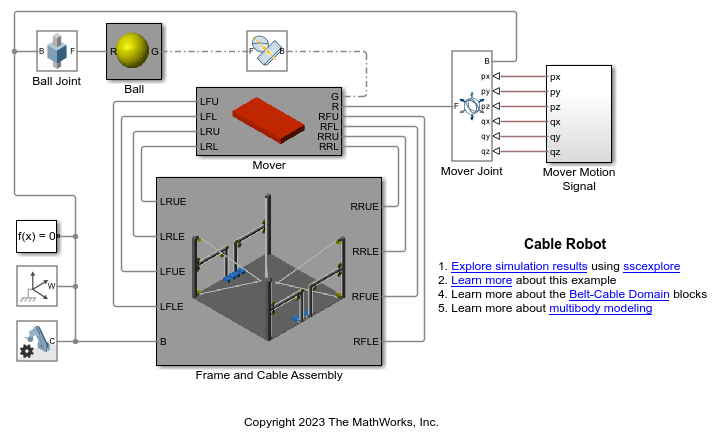
Cable Robot
This example models a cable robot. The robot comprises 8 independent belt-cable circuits which control the 6 degrees-of-freedom of the mover. A ball is dropped from a fixed height down the center axis of the mechanism. The mover initially starts directly below the ball and the contact is modeled between the mover and the ball such that the ball bounces elastically when striking the mover. The objective of the mover is to perform increasingly complex maneuvers between successive bounces of the ball. The mover is motion actuated from which the necessary cable, pulley, and motor spool kinematics are computed.
See Also
Belt-Cable End | Belt-Cable Properties | Belt-Cable Spool | Bushing Joint | Planar Joint | Pulley | Revolute Joint | Spatial Contact Force | Spherical Joint