Model an Open-Loop Kinematic Chain
Model Overview
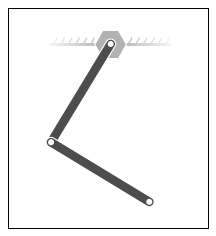
This example shows how to model a double pendulum—a simple kinematic chain comprising two
moving bodies connected in series via two revolute joints. A third body
represents a mechanical ground and is rigidly connected to the inertial World
frame. The custom DocCompoundRigidBodiesLibrary library
provides the body subsystem blocks used in the example.
Revolute Joint blocks enable you to model the joints connecting adjacent bodies and help set their initial states. Simscape™ Multibody™ software satisfies a joint state target precisely if it is kinematically valid and not in conflict with other state targets. A Priority parameter lets you specify which targets to attempt to satisfy first.
Build Model
Start a new model.
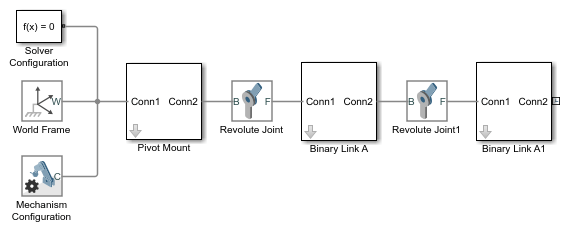
Drag these blocks into the model. The two Revolute Joint blocks provide the double pendulum two rotational degrees of freedom.
Library Block Quantity Simscape > Utilities Solver Configuration 1 Simscape > Multibody > Utilities Mechanism Configuration 1 Simscape > Multibody > Frames and Transforms World Frame 1 Simscape > Multibody > Joints Revolute Joint 2 At the MATLAB® command prompt, enter
openExample('sm/DocDoublePendulumModelExample','supportingFile','DocCompoundRigidBodiesLibrary.slx'). A custom block library with the same name opens up.Drag these custom blocks into the model. Each block represents a body in the double pendulum.
Block Quantity Pivot Mount 1 Binary Link A 2 Connect the blocks as shown in the figure.
Guide Model Assembly
In the Revolute Joint block dialog boxes, select State Targets > Specify Position Target. You can now specify the desired starting positions of the two joints.
In Value, enter these joint angles.
Block Name Value (degrees) Revolute Joint 30 Revolute Joint1 -75
Visualize Model and Check Assembly Status
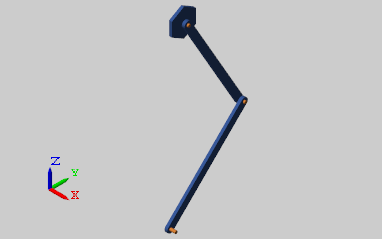
To visualize the model, update the block diagram. In the Modeling tab, click Update Model. Multibody Explorer opens with a 3-D view of the double pendulum assembly. Click the isometric view button to obtain the perspective in the figure.
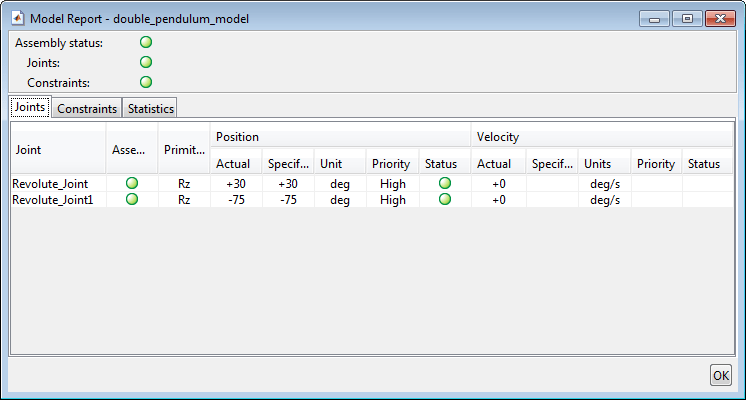
To check the assembly status of the revolute joints, use Variable Viewer. To open the tool, in the Diagnostics section of the Multibody Explorer, click Variable Viewer. The figure shows the assembly information for the double pendulum.
Simulate Model
Run the simulation. Multibody Explorer shows a 3-D animation of the double pendulum assembly. The assembly moves due to gravity, specified in the Mechanism Configuration block.
Open Reference Model
To see a complete model of the double pendulum assembly, at the MATLAB command prompt, enter
openExample("sm/DocDoublePendulumModelExample").