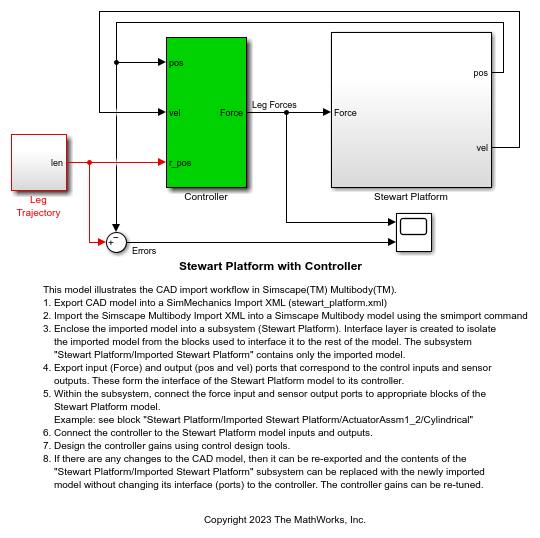
Stewart Platform with Controller
This model illustrates the CAD import workflow in Simscape™ Multibody™.
1. Export CAD model into a Simscape Multibody Import XML (stewart_platform.xml).
2. Import the Simscape Multibody Import XML into a Simscape Multibody model using the smimport command.
3. Enclose the imported model into a subsystem (Stewart Platform). Interface layer is created to isolate the imported model from the blocks used to interface it to the rest of the model. The subsystem "Stewart Platform/Imported Stewart Platform" contains only the imported model.
4. Export input (Force) and output (pos and vel) ports that correspond to the control inputs and sensor outputs. These form the interface of the Stewart Platform model to its controller.
5. Within the subsystem, connect the force input and sensor output ports to appropriate blocks of the Stewart Platform model. Example: see block "Stewart Platform/Imported Stewart Platform/ActuatorAssm1_2/Cylindrical".
6. Connect the controller to the Stewart Platform model inputs and outputs.
7. Design the controller gains using control design tools.
8. If there are any changes to the CAD model, then it can be re-exported and the contents of the Stewart Platform/Imported Stewart Platform" subsystem can be replaced with the newly imported model without changing its interface (ports) to the controller. The controller gains can be re-tuned.