Hydraulic Turbine and Governor
(To be removed) Model hydraulic turbine and proportional-integral-derivative (PID) governor system
The Specialized Power Systems library will be removed in R2026a. Use the Simscape™ Electrical™ blocks and functions instead. For more information on updating your models, see Upgrade Specialized Power Systems Models to use Simscape Electrical Blocks.
Libraries:
Simscape /
Electrical /
Specialized Power Systems /
Electrical Machines /
Synchronous Machine Control
Description
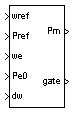
The Hydraulic Turbine and Governor block implements a nonlinear hydraulic turbine model, a PID governor system, and a servomotor [1].

The hydraulic turbine is modeled by the following nonlinear system.

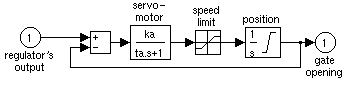
The gate servomotor is modeled by a second-order system.
Ports
Input
Output
Parameters
References
[1] IEEE Working Group on Prime Mover and Energy Supply Models for System Dynamic Performance Studies, “Hydraulic Turbine and Turbine Control Models for Dynamic Studies,” IEEE® Transactions on Power Systems, Vol. 7, No. 1, February, 1992, pp. 167-179.
Extended Capabilities
Version History
Introduced before R2006a