Permanent Magnet Synchronous Machine
(To be removed) Three-phase permanent magnet synchronous machine with sinusoidal or trapezoidal back electromotive force, or five-phase permanent magnet synchronous machine with sinusoidal back electromotive force
The Specialized Power Systems library will be removed in R2026a. Use the Simscape™ Electrical™ blocks and functions instead. For more information on updating your models, see Upgrade Specialized Power Systems Models to use Simscape Electrical Blocks.
Libraries:
Simscape /
Electrical /
Specialized Power Systems /
Electrical Machines
Description
The Permanent Magnet Synchronous Machine block implements a three-phase or a five-phase permanent magnet synchronous machine. The stator windings are connected in wye to an internal neutral point.
The three-phase machine can have a sinusoidal or trapezoidal back EMF waveform. The rotor can be round or salient-pole for the sinusoidal machine. The rotor is round when the machine is trapezoidal. Preset models are available for the sinusoidal back EMF machine.
The five-phase machine has a sinusoidal back EMF waveform and round rotor.
The Permanent Magnet Synchronous Machine block operates in either generator or motor mode. The mode of operation is dictated by the sign of the mechanical torque (positive for motor mode, negative for generator mode). The electrical and mechanical parts of the machine are each represented by a second-order state-space model.
The sinusoidal model assumes that the flux established by the permanent magnets in the stator is sinusoidal, which implies that the electromotive forces are sinusoidal.
The trapezoidal model assumes that the winding distribution and flux established by the permanent magnets produce three trapezoidal back EMF waveforms.
Three-Phase Sinusoidal Model Electrical System
These equations are expressed in the rotor reference frame (qd frame). All quantities in the rotor reference frame are referred to the stator.
Lq, Ld | q-axis and d-axis inductances |
R | Resistance of the stator windings |
iq, id | q-axis and d-axis currents |
vq, vd | q-axis and d-axis voltages |
ωm | Angular velocity of the rotor |
λ | Amplitude of the flux induced by the permanent magnets of the rotor in the stator phases |
p | Number of pole pairs |
Te | Electromagnetic torque |
The Lq and Ld inductances represent the relation between the phase inductance and the rotor position due to the saliency of the rotor. For example, the inductance measured between phase A and B (when phase C is left open) is given by:
where Θe represents the electrical angle.
The next figure shows the variation of the phase-to-phase inductance in function of the electrical angle of the rotor.

For a round rotor, there is no variation in the phase inductance:
For a salient round rotor, the dq inductances are given by:
Five-Phase Sinusoidal Model Electrical System
These equations are expressed in the rotor reference frame using an extended Park transformation (q1d1 and q2d2 frame). All quantities in the rotor reference frame are referred to the stator.
L | Armature inductance |
R | Resistance of the stator windings |
iq1, id1 | q1-axis and d1-axis currents |
vq1, vd1 | q1-axis and d1-axis voltages |
iq2, id2 | q2-axis and d2-axis currents |
vq2, vd2 | q2-axis and d2-axis voltages |
ωm | Angular velocity of the rotor |
λ | Amplitude of the flux induced by the permanent magnets of the rotor in the stator phases |
p | Number of pole pairs |
Te | Electromagnetic torque |
Three-Phase Trapezoidal Model Electrical System
These equations are expressed in the phase reference frame (abc frame). Note that the phase inductance Ls is assumed to be constant and does not vary with the rotor position.
Ls | Inductance of the stator windings |
R | Resistance of the stator windings |
ia, ib, ic | a, b and c phase currents |
Φa', Φb', Φc' | a, b and c phase electromotive forces, in per-unit value to the amplitude of the flux λ |
vab, vbc | ab and bc phase to phase voltages |
ωm | Angular velocity of the rotor |
λ | Amplitude of the flux induced by the permanent magnets of the rotor in the stator phases |
p | Number of pole pairs |
Te | Electromagnetic torque |
The electromotive force Φ' is represented by:

Mechanical System
J | Combined inertia of rotor and load |
F | Combined viscous friction of rotor and load |
θ | Rotor angular position |
Tm | Shaft mechanical torque |
Tf | Shaft static friction torque |
ωm | Angular velocity of the rotor (mechanical speed) |
Limitations and Assumptions
When you use Permanent Magnet Synchronous Machine blocks in discrete systems, you might have to use a small parasitic resistive load, connected at the machine terminals, to avoid numerical oscillations. Large sample times require larger loads. The minimum resistive load is proportional to the sample time. Remember that with a 25 μs time step on a 60 Hz system, the minimum load is approximately 2.5% of the machine nominal power. For example, a 200 MVA permanent magnet synchronous machine in a power system discretized with a 50 μs sample time requires approximately 5% of resistive load, or 10 MW. If the sample time is reduced to 20 μs, a resistive load of 4 MW is sufficient.
The Permanent Magnet Synchronous Machine block assumes a linear magnetic circuit with no saturation of the stator and rotor iron. This assumption can be made because of the large air gap usually found in permanent magnet synchronous machines.
Ports
Input
Output
Vector containing measurement signals. The block returns a 13-element vector when
Number of phases is set to
3, and a 16-element vector when Number of
phases is set to 5. The available
signals depend on the model you selected. You can demultiplex these
signals by using the Bus Selector block provided in the
Simulink® library. The signals include:
Name | Definition | Units | Model |
|---|---|---|---|
ias | Stator current is_a | A | All |
ibs | Stator current is_b | A | All |
ics | Stator current is_c | A | All |
ids | Stator current is_d | A | Five-Phase Sinusoidal |
ies | Stator current is_e | A | Five-Phase Sinusoidal |
iqs | Stator current is_q | A | Three-Phase Sinusoidal |
ids | Stator current is_d | A | Three-Phase Sinusoidal |
iqs1 | Stator current is_q1 | A | Five-Phase Sinusoidal |
ids1 | Stator current is_d1 | A | Five-Phase Sinusoidal |
iqs2 | Stator current is_q2 | A | Five-Phase Sinusoidal |
ids2 | Stator current is_d2 | A | Five-Phase Sinusoidal |
vqs | Stator voltage Vs_q | V | Three-Phase Sinusoidal |
vds | Stator voltage Vs_d | V | Three-Phase Sinusoidal |
vqs1 | Stator voltage Vs_q1 | V | Five-Phase Sinusoidal |
vds1 | Stator voltage Vs_d1 | V | Five-Phase Sinusoidal |
vqs2 | Stator voltage Vs_q2 | V | Five-Phase Sinusoidal |
vds2 | Stator voltage Vs_d2 | V | Five-Phase Sinusoidal |
ea | Phase back EMF e_a | V | Three-Phase Trapezoidal |
eb | Phase back EMF e_b | V | Three-Phase Trapezoidal |
ec | Phase back EMF e_c | V | Three-Phase Trapezoidal |
ha | Hall effect signal h_a* | logical (0 or 1) | Three-Phase, Sinusoidal and Trapezoidal |
hb | Hall effect signal h_b* | logical (0 or 1) | Three-Phase, Sinusoidal and Trapezoidal |
hc | Hall effect signal h_c* | logical (0 or 1) | Three-Phase, Sinusoidal and Trapezoidal |
w | Rotor speed wm | rad/s | All |
theta | Rotor angle thetam | rad | All |
Te | Electromagnetic torque Te | N.m | All |
The Hall effect signal provides a logical indication of the back EMF positioning. This signal is very useful to directly control the power switches. There is a change of state at each zero crossing of the phase-to-phase voltage. These signals must be decoded before being applied to the switches.

Conserving
Parameters
Configuration
Select between a three-phase machine model or a five-phase machine model.
Select between Sinusoidal and
Trapezoidal electromotive force.
Dependencies
To enable this parameter, set Number of
phases to 3.
Select between Salient-pole and
Round rotors.
Dependencies
To enable this parameter, set Number of
phases to 3 and set
Back EMF waveform to
Sinusoidal.
Select whether input is supplied by torque applied to the shaft, rotor speed, or a machine shaft represented by a Simscape rotational mechanical port.
Select Torque Tm to specify a torque input in N.m
and expose the Tm port. The machine speed is
determined by the machine Inertia J and by the difference between the
applied mechanical torque Tm and the internal electromagnetic torque Te.
The sign convention for the mechanical torque is when the speed is
positive. A positive torque signal indicates motor mode and a negative
signal indicates generator mode.
Select Speed w to specify a speed input in rad/s
and expose the w port. The machine speed is imposed
and the mechanical part of the model (Inertia J) is ignored. Using the
speed as the mechanical input allows modeling a mechanical coupling
between two machines.
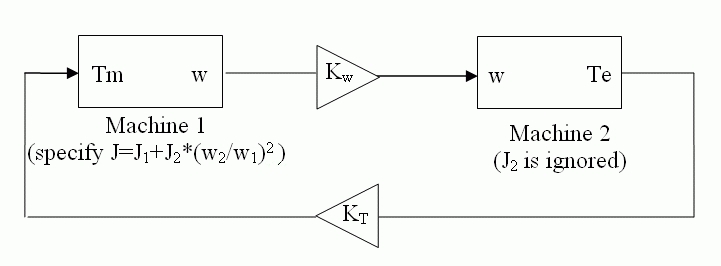
The next figure indicates how to model a stiff shaft interconnection in a
motor-generator set when friction torque is ignored in machine 2. The
speed output of machine 1 (the motor) is connected to the speed input of
machine 2 (the generator), while the machine 2 electromagnetic torque
output, Te, is applied to the mechanical torque input of machine 1, Tm.
The Kw factor takes into account the speed units of both machines (pu or
rad/s) and the gear box ratio w2/w1. The KT factor
takes into account the torque units of both machines (pu or N.m) and
machine ratings. Also, because the inertia J2 is ignored in machine 2,
J2 is added to the machine 1 inertia, J1.
Select Mechanical rotational port to expose a
Simscape mechanical rotational port that allows you to connect the
machine shaft to other Simscape blocks with mechanical rotational ports.
The next figure indicates how to connect an Ideal Torque Source block from the Simscape library to the machine shaft to represent the machine in motor mode or in generator mode.

Predetermined electrical and mechanical parameters for various permanent magnet synchronous motor ratings of torque (N.m), DC bus voltage (V), rated speed (rpm), and continuous stall torque (N.m).
Select one of the preset models to load the corresponding electrical
and mechanical parameters in the entries of the dialog box. Select
No (default) if you do not want to use a
preset model, or if you want to modify some of the parameters of a
preset model.
The available preset models are:
No01: 0.8 Nm 300 Vdc 3000 RPM - 0.8 Nm02: 1.7 Nm 300 Vdc 3750 RPM - 1.7 Nm03: 2.8 Nm 300 Vdc 4250 RPM - 3.2 Nm04: 6 Nm 300 Vdc 4500 RPM - 6 Nm05: 8 Nm 300 Vdc 2000 RPM - 10 Nm06: 10 Nm 300 Vdc 2300 RPM - 14.2 Nm07: 20 Nm 300 Vdc 2200 RPM - 33.9 Nm08: 24 Nm 300 Vdc 2300 RPM - 41.4 Nm09: 7.14 Nm 560 Vdc 5000 RPM - 8.3 Nm10: 7.71 Nm 560 Vdc 5000 RPM - 10.2 Nm11: 26.13 Nm 560 Vdc 3000 RPM - 27.3 Nm12: 35.17 Nm 560 Vdc 3000 RPM - 37.4 Nm13: 42.09 Nm 560 Vdc 3000 RPM - 45.6 Nm14: 67.27 Nm 560 Vdc 1700 RPM - 70.2 Nm15: 87.75 Nm 560 Vdc 3000 RPM - 97.96 Nm16: 111 Nm 560 Vdc 3000 RPM - 126 Nm
When you select a preset model, the electrical and mechanical parameters in the Parameters tab of the dialog box are disabled. To start from a given preset model and then modify machine parameters:
Select the preset model for which you want to initialize the parameters.
Change Preset model to
No. This does not change the machine parameters in the Parameters tab.Modify the machine parameters, then click Apply.
Dependencies
To enable this parameter, set Number of phases to
5, or set Number of
phases to 3 and Back EMF
waveform to
Sinusoidal.
When selected, the measurement output uses the signal names to identify the bus labels. Select this option for applications that require bus signal labels to have only alphanumeric characters.
When cleared, the measurement output uses the signal definition to identify the bus labels. The labels contain nonalphanumeric characters that are incompatible with some Simulink applications.
Parameters
Stator phase resistance Rs (Ω).
Stator-phase-to-neutral inductance Ls (H) of the trapezoidal model.
Dependencies
To enable this parameter, set Number of phases to
3 and Back EMF waveform
to Trapezoidal.
Phase-to-neutral Ld (H) and Lq (H) inductances in the d-axis and q-axis of the sinusoidal model with a salient-pole rotor.
Dependencies
To enable this parameter, set Number of phases to
3, Back EMF waveform to
Sinusoidal, and Rotor
type to
Salient-pole.
Armature inductance of the sinusoidal model with a round rotor. Ld is equal to Lq.
Dependencies
To enable this parameter, set Number of phases to
3, Back EMF waveform to
Sinusoidal, and Rotor
type to Round.
Machine constant for block parameterization. Once you select a constant, you can enter its value in the appropriate parameter field, while the other two parameters are disabled.
Constant flux λ (Wb) per pole pairs induced in the stator windings by the magnets.
Dependencies
To enable this parameter, set Specify to
Flux linkage established by magnets
(V.s).
Peak line-to-line voltage per 1000 rpm. This voltage represents the peak open circuit voltage when the machine is driven as a generator at 1000 rpm.
Dependencies
To enable this parameter, set Specify to
Voltage Constant (V_peak L-L /
krpm).
Torque per ampere constant. This constant assumes that the machine is driven by an inverter that provides a perfect synchronization between the current and the back EMF.
Sinusoidal model: A sine wave current is assumed.
Trapezoidal model: A square ware current is assumed.
Dependencies
To enable this parameter, set Specify to
Torque Constant (N.m /
A_peak).
Width of the flat top for a half period of the electromotive force Φ' (degrees) for a trapezoidal machine.
Dependencies
To enable this parameter, set Number of phases to
3 and Back EMF waveform
to Trapezoidal.
Combined machine and load inertia coefficient J (kg.m2),
combined viscous friction coefficient F (N.m.s), pole pairs p, and shaft
static friction Tf (N.m). If
the fourth value of the vector (static friction) is not specified, the
block considers this value to be 0.
Dependencies
To enable this parameter, set Mechanical
input to Torque Tm or
Mechanical rotational port.
Number of pole pairs, p.
Dependencies
To enable this parameter, set Mechanical
input to Speed w.
Mechanical speed (rad/s), mechanical angle Θm (degrees), and instantaneous stator current (A) for a three-phase machine [wm, Θm, ia, ib].
Because the stator is wye-connected and the neutral point is isolated, the current ic in the three-phase machine is given by ic = -ia-ib.
Dependencies
To enable this parameter, set Number of
phases to 3.
Mechanical speed (rad/s), mechanical angle Θm (degrees), and instantaneous stator current (A) for a five-phase machine [wm, Θm, ia, ib, ic, id].
Because the stator is wye-connected and the neutral point is isolated, the current ie in the five-phase machine is given by ie = -ia -ib -ic -id.
Dependencies
To enable this parameter, set Number of
phases to 5.
Reference position of the rotor flux relative to the phase A axis.
Select 90 degrees behind phase A axis (modified
Park) to choose the reference position of the rotor
represented by:

The modified Park transformation [4] is more convenient for vector control because the maximum phase induction occurs at theta = 0.
Select Aligned with phase A axis (original
Park) to choose the reference position of the rotor
represented by:
Advanced
To enable the Advanced tab, set the Simulation type parameter of the powergui block to Discrete and, on the Preferences tab, clear the Automatically handle discrete solver and Advanced tab solver settings of blocks parameter.
Integration method used by the block.
When you select the Automatically handle discrete solver and
Advanced tab solver settings of blocks parameter in the
powergui block, the discrete solver model is
automatically set to Trapezoidal
robust.
Trapezoidal non iterative requires you to
add a non-negligible shunt load at the machine terminals to maintain
simulation stability, and the simulation may fail to converge and stop
when the number of machines increases in the model.
Trapezoidal robust and
Backward Euler robust allow you to
eliminate the need to use parasitic loads. To eliminate the topological
errors of the machines connected to an inductive circuit (for example, a
circuit breaker connected in series with the machine), the machine
models a negligible internal load of 0.01% of nominal
power.
Trapezoidal robust is slightly more
accurate than Backward Euler robust,
especially when the model is simulated at larger sample times.
Trapezoidal robust may produce slight
damped numerical oscillations on machine voltage in no-load conditions,
while Backward Euler robust prevents
oscillations and maintains accuracy.
Sample time used by the block. To inherit the sample time specified in
the powergui block, set this parameter to
-1 (default).
References
[1] Grenier, D., L.-A. Dessaint, O. Akhrif, Y. Bonnassieux, and B. LePioufle. “Experimental Nonlinear Torque Control of a Permanent Magnet Synchronous Motor Using Saliency.” IEEE® Transactions on Industrial Electronics, Vol. 44, No. 5, October 1997, pp. 680-687.
[2] Toliyat, H.A. “Analysis and Simulation of Multi-Phase Variable Speed Induction Motor Drives Under Asymmetrical Connections.” Applied Power Electronics Conference and Exposition, Vol. 2, March 1996, pp. 586-592.
[3] Beaudart, F., F. Labrique, E. Matagne, D. Telteux, and P. Alexandre. “Control under normal and fault tolerant operation of multiphase SMPM synchronous machines with mechanically and magnetically decoupled phases.” International Conference on Power Engineering, Energy and Electrical Drives, March 2009, pp. 461-466.
[4] Krause, P.C., O. Wasynczuk, and S.D. Sudhoff. Analysis of Electric Machinery and Drive Systems. IEEE Press, 2002.
Extended Capabilities
Version History
Introduced before R2006a