DC Current Controller
Discrete-time DC current PI control with integral anti-windup
Libraries:
Simscape /
Electrical /
Control /
General Machine Control
Description
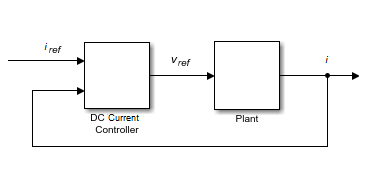
The DC Current Controller block implements a discrete-time proportional-integral (PI) DC voltage controller. The block can implement zero cancellation in the feedforward path. To avoid saturation of the integral gain, the block can implement anti-windup gain.
Equations
The equation that the DC Current Controller block uses to calculate the reference voltage is
where:
vref is the reference voltage.
Kp is the proportional gain.
Ki is the integral gain.
Ts is the sample time.
iref is the reference current.
i is the measured current.
The PI control calculation yields a zero in the closed-loop transfer function. To cancel the zero, the block uses this discrete-time zero-cancellation transfer function:
To avoid saturation of the integrator output, the block uses an anti-windup mechanism. The integrator gain is then equal to
where:
Kaw is the anti-windup gain.
vref_sat is the saturated reference voltage signal, which the block calculates as
where:
vref_unsat is the unsaturated reference voltage signal.
vmin is the lower limit for the output voltage. For positive voltage only, . For positive and negative voltage,
vmax is the upper limit for the output voltage.
Examples
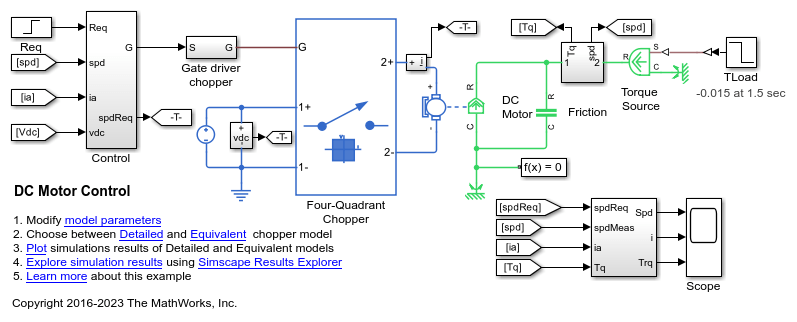
DC Motor Control
A cascade speed-control structure for a DC motor. A PWM controlled four-quadrant Chopper is used to feed the DC motor. The Control subsystem includes the outer speed-control loop, the inner current-control loop, and the PWM generation. The total simulation time (t) is 4 seconds. At t = 1.5 seconds, the load torque increases. At t = 2.5 seconds, the reference speed is changed from 1000 rpm to 2000 rpm.
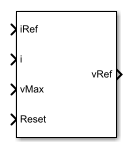
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2018a