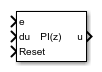
PI Controller (Discrete or Continuous)
具有外部抗积分饱和输入功能的离散时间或连续时间 PI 控制器
库:
Simscape /
Electrical /
Control /
General Control
描述
Discrete PI Controller 模块实现具有外部抗积分饱和输入功能的离散时间或连续时间 PI 控制。
下图显示了带外部抗积分饱和输入功能的控制器的等效电路。

方程
PI Controller (Discrete or Continuous) 模块使用后向欧拉离散化方法计算控制信号:
其中
u 是控制信号。
Kp 是比例增益系数。
Ki 是积分增益系数。
Kaw 是抗积分饱和增益系数。
Ts 是采样期间。
e 是误差信号。
为防止过度过冲,该模块可以使用反向计算来实现外部抗积分饱和机制。它输入 du(k),即饱和控制信号 usat(k) 与计算出的非饱和控制信号 u(k) 之间的差值。然后,它将该差值乘以抗积分饱和系数,并加上经积分增益放大后的信号。
示例
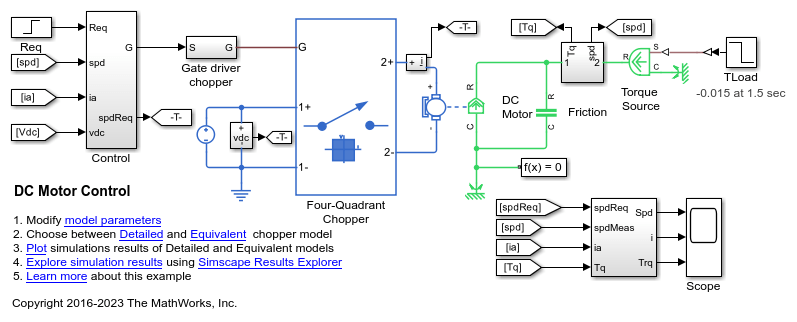
DC 电机控制
此示例展示了 DC 电机的级联速度控制结构。采用 PWM 控制的四象限斩波器为该 DC 电机供电。Control 子系统包括外层转速控制环、内层电流控制环和 PWM 生成模块。总仿真时间 (t) 为 4 秒。在 t = 1.5 秒时,负载转矩增加。在 t = 2.5 秒时,参考转速从 1000 rpm 变为 2000 rpm。
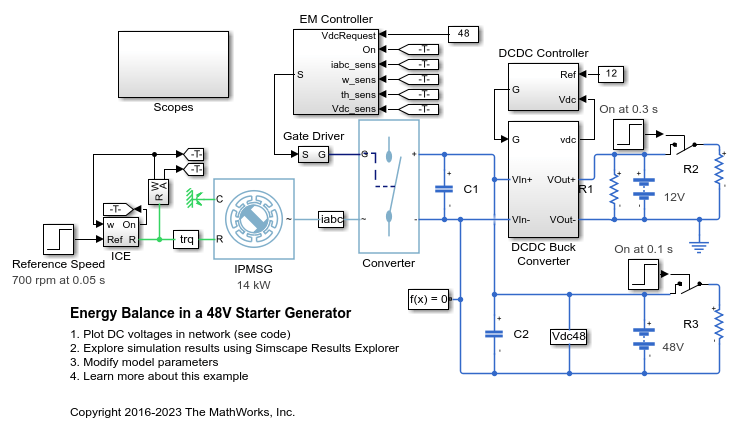
48 V 起动发电机中的能量平衡
An interior permanent magnet synchronous machine (IPMSM) used as a starter/generator in a simplified 48V automotive system. The system contains a 48V electric network and a 12V electric network. The internal combustion engine (ICE) is represented by basic mechanical blocks. The IPMSM operates as a motor until the ICE reaches the idle speed and then it operates as a generator. The IPMSM supplies power to the 48V network, which contains the R3 power consumer. The 48V network supplies power to the 12V network which has two consumers: R1 and R2. The total simulation time (t) is 0.5 seconds. At t = 0.05 seconds, the ICE turns on. At t = 0.1 seconds, R3 switches on. At t = 0.3 seconds, R2 switches on and increases the load on the 12V electric network. The EM Controller subsystem includes a multi-rate PI-based cascade control structure which has an outer voltage-control loop and two inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The DCDC Controller subsystem implements a simple PI controller for the DC-DC Buck converter, which feeds the 12V network. The Scopes subsystem contains scopes that allow you to see the simulation results.

IPMSG 电压稳定
Control an Interior Permanent Magnet Synchronous Generator (IPMSG) based low voltage generator system for a hybrid electric vehicle (HEV). The Control subsystem includes a multi-rate PI-based cascade control structure which has an outer voltage-control loop and two inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The Scopes subsystem contains scopes that allow you to see the simulation results. An ideal angular velocity source, which represents a combustion engine, drives the IPMSG. The IPMSG supplies low-voltage power to loads R1 and R2. At t = 0.4 seconds, the switch closes, increasing the load.
端口
输入
输出
参数
参考
[1] Åström, K. and T. Hägglund. Advanced PID Control. Research Triangle Park, NC: ISA, 2005.