Rotating Air Gap
Air gap between stator tooth and rotating permanent magnet rotor

Libraries:
Simscape /
Electrical /
Electromechanical
Description
The Rotating Air Gap block models an air gap between a stator tooth and a rotating permanent magnet rotor. This block assumes that the rotor magnets are surface mounted and that the associated induced voltage is sinusoidal.
This figure shows the relationship between the parameters of the Rotating Air Gap block and their physical values inside a permanent magnet motor
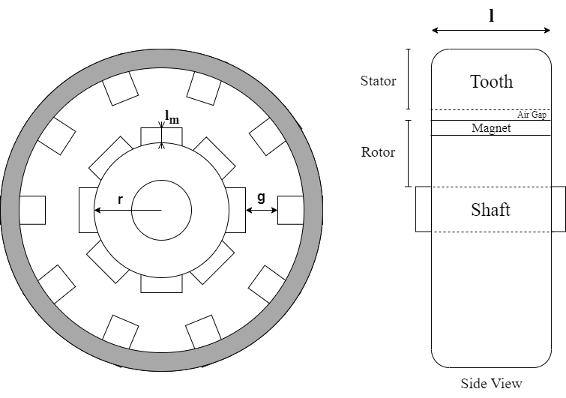
where:
r is the value of the Rotor radius parameter.
g is the value of the Air gap parameter.
lm is the value of the Permanent magnet length (in direction of flux) parameter.
l is the value of the Tooth depth (in direction of shaft) parameter.
The rotor circumference is equal to . Then, the width of a permanent magnet on the rotor is equal to , where N is the Number of rotor pole pairs.
If the rotor angle is zero, specified by the Rotor angle variable in the Variables section, then the rotor magnet perfectly aligns with the middle of the first stator tooth. The permanent magnet is then orientated to oppose the flux flow from port N to port S.
Use this block to create a magnetic representation of a permanent magnet synchronous motor
(PMSM). For example, if you want to model a motor with nine stator poles, create nine
copies of this block and set each of the Stator tooth reference
index parameters to 1, 2,
3, 4, 5,
6, 7, 8, and
9, respectively.
Equations
This figure shows the equivalent circuit for the air gap and the adjacent permanent magnet
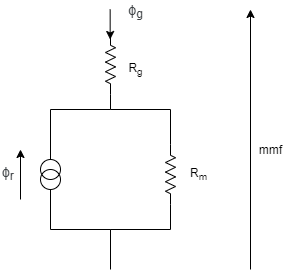
where:
ϕg is the magnetic flux that flows from the external magnetic circuit to port N.
Rg is the air gap reluctance.
mmf is the magnetomotive force across the rotating air gap component.
Rm is the permanent magnet reluctance.
ϕr is the magnetic flux generated by the rotor permanent magnets in the angle range subtended by the stator tooth.
This equation defines the relationship between ϕg, mmf, and ϕr:
If the back EMF is sinusoidal, the flux density of the permanent magnet rotor is defined by this equation
where:
N is the Number of rotor pole pairs.
θr is the rotor angle.
θs is the stator angle.
B0 is the Peak magnet flux density, in Tesla.
Then, to obtain the permanent magnet flux linkage, integrate over the stator angle subtended by the stator tooth
where:
r is the Rotor radius.
l is the Tooth depth (in direction of shaft).
For an ideal PMSM, the θtooth must be equal to 2π/Ns, where Ns is the value of the Number of stator teeth parameter. Then the equation of the flux that flows through the equivalent circuit is obtained by solving the integral:
To obtain the torque generated across the air gap, first calculate the total energy stored by the component:
Then, to obtain the torque, differentiate with respect to the rotor angle:
Finally, calculate Rg and Rm in terms of geometry:
where:
μ0 is the permittivity of free space.
μr is the relative permittivity of the permanent magnet.
g is the Air gap.
lm is the magnet length.
Faults
You can fault the Rotating Air Gap block. To enable faults, in the Faults section, select the Enable faults parameter.
Note
The Rotating Air Gap block does not support non-intrusive fault modeling. To model non-intrusive faults, use the Magnetic Rotor.
A fault is defined as a reduction in the peak magnet flux density. The flux density associated with each rotor magnet remains sinusoidal in shape. When the Rotating Air Gap block is in the faulted state, you can apply a reduction factor to the flux density of any of the rotor poles by specifying the Flux multipliers for faulted rotor poles parameter.
The unfaulted flux density in the air gap of a perfect PMSM with a sinusoidal back EMF is equal to:
When the faulted magnet interacts with the tooth, the block uses this equation to define the flux density
where λ is the factor that maps peak B0 to the faulted B0, and is defined in the Flux multipliers for faulted rotor poles parameter.
The transition to the faulted values linearly blends over the time period that you specify in the Duration of transition to faulted parameter. Use this parameter to emulate how an overheated permanent magnet gradually loses its magnetization over time.
Variables
To set the priority and initial target values for the block variables before simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Use nominal values to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources. One of these sources is the Nominal Values section in the block dialog box or Property Inspector. For more information, see System Scaling by Nominal Values.
Examples
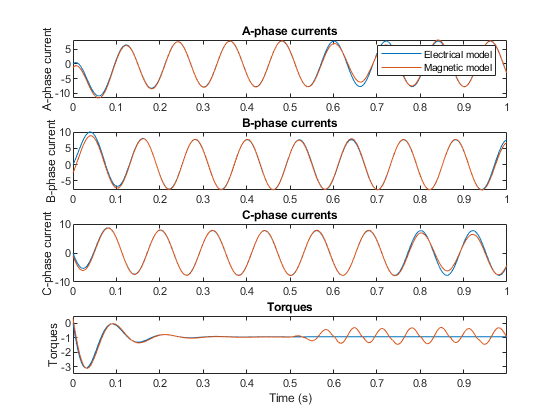
Model Faulted PMSM
Model a faulted permanent magnet synchronous motor (PMSM) using Simscape™ Electrical™. Normally when modeling a PMSM, you can represent each winding as a single entity with associated inductance, induced back electromotive force (EMF), and mutual inductive coupling to adjacent windings. However, when a winding fault occurs, the single entity assumption breaks down. To correctly capture the resulting dynamics, you must model the motor at a winding slot level. This requires modeling in the magnetic domain.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2021a