PMSM
具有正弦磁通分布的永磁同步电机

库:
Simscape /
Electrical /
Electromechanical /
Permanent Magnet
描述
PMSM 模块对具有三相星型绕组定子、三角型绕组定子或开放端定子的永磁同步电机 (PMSM) 进行建模。使用此模块可以对内置式永磁同步电机 (IPMSM)、表面贴装永磁同步电机 (SPMSM)、横向磁通电机、轴向磁通(扁平式)电机或 PMSM 伺服电机进行建模。
PMSM 由永磁转子和绕组定子组成。这些电机可以用于电动汽车 (EV) 等牵引应用以及作动系统中。在作动系统中,PMSM 也称为无刷伺服电机。无刷直流 (BLDC) 电机具有梯形反电动势曲线,相较之下,PMSM 通常具有正弦反电动势曲线,可减少不需要的高频机械和电流谐波。
PMSM 模块使用固定 d 轴电感 (q) 和 Ld 轴电感 (Lq) 对电机进行建模。您可以使用此模块对两种主要类型的 PMSM 进行建模:
SPMSM(即表面贴装式永磁 (SPM) 电机)- 转子磁体是表面贴装的。Ld 和 Lq 相等。
IPMSM(即内置式永磁 (IPM) 电机)- 转子磁体位于转子内部。Ld 和 Lq 不相等。
PMSM 还可按主磁通路径进行分类。主磁通路径通常是径向的,但也可能是轴向的,在相同物理尺寸的电机中,轴向磁通路径能够产生更高的转矩。径向和轴向磁通 PMSM 均可使用 PMSM 模块来进行建模。
您可以使用绕组类型参数来指定绕组的配置。下图显示了星型绕组定子的等效电路。

您还可以通过分别将绕组类型设置为三角型绕组或开放端,来对三角型绕组定子或开放端定子进行建模。
您可以为此模块选择不同的内置参数化。有关详细信息,请参阅预定义参数化部分。
注意
Simscape™ Electrical™ 包含多个模块,这些模块可以对同一类型的电机或作动器进行建模。请选择所含建模细节足以应对所需解决的工程设计问题的模块。请勿使用建模细节超出需求的模块,因为保真度更高的模型会减慢仿真速度,而且参数化也更复杂。
诸如 PMSM 之类的模块使用简单的等效电路,以固定系数或参数相关系数对电机进行建模。这些模型具有中等级别的保真度。可使用此模块来设计作动应用中的控制装置或系统(例如机器人和机电),以及在饱和状态与谐波对损耗影响较小时进行效率预测。有关如何选择合适的模块以合适的保真度对电机进行建模的详细信息,请参阅选择模块来建模电机或作动器。
电机构造
下图显示了转子上有单个极对的电机构造。
永磁体产生转子磁场,该磁场会根据转子角度产生正弦波形的磁通变化率。
在坐标区约定中,当您将转子角定义参数设置为 a 相磁轴和 d 轴之间的角度时,a 相和永磁体磁通会在转子机械角 θr 为零时对齐。当您将转子角定义参数设置为 a 相磁轴和 q 轴之间的角度时,转子机械角是 a 相磁轴和转子 q 轴之间的角度。
方程
定子绕组两端的电压为
其中:
va、vb 和 vc 是定子绕组上的各个相电压。
Rs 是每个定子绕组的等效电阻。
ia、ib 和 ic 是定子绕组中的电流。
、 和 是每个定子绕组中磁通的变化率。
永磁体和三个绕组共同构成每个绕组所链环的总磁通。总磁通为
其中:
ψa、ψb 和 ψc 是每个定子绕组所链环的总磁通。
Laa、Lbb 和 Lcc 是定子绕组的自感。
Lab、Lac、Lba 等是定子绕组的互感。
ψam、ψbm 和 ψcm 是定子绕组所链环的永磁体磁通。
定子绕组中的电感是转子电角的函数,由以下方程定义:
其中:
θr 是转子机械角。
θe 是转子电角。
如果将转子电角定义为相对于 d 轴,则 rotor offset 为
0,而如果定义为相对于 q 轴,则为-pi/2。Ls 是每相定子自感。此值是每个定子绕组的平均自感。
Lm 是定子电感波动。此值表示自感和互感随转子角变化而产生的波动量。
Ms 是定子互感。此值是定子绕组之间的平均互感。
当 θe = 0° 时,绕组 a 所链环的永磁磁通最大;当 θe = 90° 时,该永磁磁通为零。因此,所链环的电机磁通由以下方程定义:
其中 ψm 是永磁磁链。
简化的电气方程
通过对模块电气方程应用帕克变换,可以得到一个与转子角无关的转矩表达式。
帕克变换由以下方程定义:
其中 θe 为电角,定义为 Nθr。N 为极对数。
通过对定子绕组电压和电流进行帕克变换,可将其变换到与转子角无关的 dq0 参考系中:
对前两个电气方程应用帕克变换,得到定义模块行为的以下方程:
其中:
Ld = Ls + Ms + 3/2 Lm。Ld 是定子 d 轴电感。
Lq = Ls + Ms − 3/2 Lm。Lq 是定子 q 轴电感。
L0 = Ls – 2Ms。L0 是定子零序电感。
ω 是转子机械转速。
N 是转子永磁极对数。
T 是转子转矩。转矩从电机外壳(模块物理端口 C)传递到电机转子(模块物理端口 R)。
PMSM 模块使用帕克变换的原始非正交实现。如果您尝试应用替代实现方案,则会得到不同的 dq0 电压和电流结果。
替代磁链参数化
您可以使用永磁磁链参数,通过反电动势常数或转矩常数(通常在电机数据手册中给出)对电机进行参数化。
反电动势常数是指永磁体在每相标幺转速下感应的峰值电压。峰值永磁磁链与反电动势之间的关系为:
一相的反电动势 eph 为:
转矩常数是指每相标幺电流感应的峰值转矩。当都以 SI 单位表示时,其数值与反电动势常数相同:
当 Ld = Lq 且三相电流平衡时,合成转矩 T 为:
其中 Ipk 是三个绕组中任意一个绕组的峰值电流。
因子 3/2 源于所有相的转矩在稳态下的总和。因此,转矩常数 kt 也可表示为:
其中 T 是在峰值线电压为 Ipk 的平衡三相电流下进行测试时测得的总转矩。RMS 线电流为:
计算铁损
铁损分为两项,一项是主励磁路径铁损,另一项是在去磁场运行期间激活的齿顶间路径铁损。铁损模型基于 [3]。
主励磁路径铁损项取决于感应 RMS 线-中性定子电压 :
这是空载运行时的主要损耗项。k 是反电动势常数,与每赫兹的 RMS 电压值相关。它被定义为 ,其中 f 是电气频率。等式右侧第一项是磁滞损耗,第二项是涡流损耗,第三项是超额损耗。分子中的三个系数是根据您提供的开路磁滞损耗、涡流损耗和超额损耗值推导得出的。
当建立了去磁场时,表示齿顶间路径铁损的项成为重要损耗项,该损耗可以通过有限元分析短路测试确定。该损耗取决于与齿顶间磁通相关的 RMS 电动势 :
三个分子项是根据您提供的短路磁滞损耗、涡流损耗和超额损耗值推导得出的。
预定义参数化
PMSM 模块有多种可用的内置参数化。
通过使用此预参数化数据,可以对模块进行设置,使其表示特定供应商的组件。这些永磁同步电机的参数化与制造商的数据手册匹配。要加载预定义参数化,请双击 PMSM 模块,点击所选部件参数的 <点击以选择> 超链接,然后在“模块参数化管理器”窗口中,从可用组件列表中选择要使用的部件。
注意
Simscape 组件的预定义参数化使用可用的数据源获取参数值。缺失的数据使用工程判断和简化假设来填补。因此,仿真物理行为与实际物理行为之间可能存在偏差。为了确保准确性,请根据试验数据验证仿真行为,并根据需要优化组件模型。
有关预参数化的详细信息以及可用组件列表,请参阅Simscape Electrical Part Collection。
热效应建模
您可以暴露热端口,以便对将电能转换为热能的损耗效应进行建模。要暴露热端口,请将建模选项参数设置为以下任一项:
无热端口 - 模块包含与定子绕组关联的扩展电气守恒端口,但不包含热端口。
显示热端口 - 模块包含与定子绕组关联的扩展电气守恒端口,以及每个绕组和转子的热守恒端口。
有关在作动器模块中使用热端口的详细信息,请参阅Simulating Thermal Effects in Rotational and Translational Actuators。
生成推导数据表
自 R2026a 起
您可以为 PMSM 模块生成一个推导数据表,其中包含与器件制造商在其数据手册中提供的摘要表和特性图类似的摘要表和特性图。内置 MATLAB® 脚本根据模型中的参数值计算模块级特性。使用推导数据表,可探索参数选择对器件特性的影响,帮助您选择制造部件,或与组织内的其他成员分享您的组件级设计。
PMSM 模块的推导数据表包含以下绘图:
峰值转矩和最大 AC 电压下,转矩和电流对转子转速的图。
50% 和 100% 额定定子电流下,转矩、效率、轴功率和定子电流对转速的图。
如果将绕组类型参数设置为开放端,则计算时假设一端接地。
要生成推导数据表,请执行以下操作:
在模块对话框的实用工具部分中,点击推导数据表参数旁边的打开实时脚本按钮,打开 MATLAB 脚本。
在打开的脚本中,指定以下各项的值:
峰值线电流
峰值最大允许线电流
最大定子线间峰值电压
额定转子转速
最大转子转速
点击脚本中的 Generate Data Sheet 按钮。
有关推导数据表的详细信息,请参阅Generate Derived Data Sheets。
变量
要在仿真之前设置模块变量的优先级和初始目标值,请使用模块对话框或属性检查器中的初始目标部分。有关详细信息,请参阅设置模块变量的优先级和初始目标值。
标称值提供了一种指定模型中变量的预期模的方法。使用基于标称值的系统缩放可提高仿真的稳健性。您可以使用不同的来源指定标称值,包括使用模块对话框或属性检查器中的标称值部分。有关详细信息,请参阅System Scaling by Nominal Values。
示例
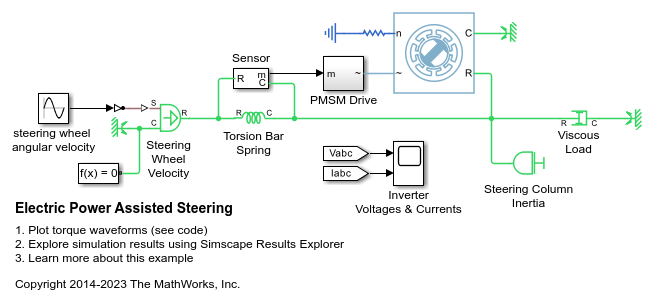
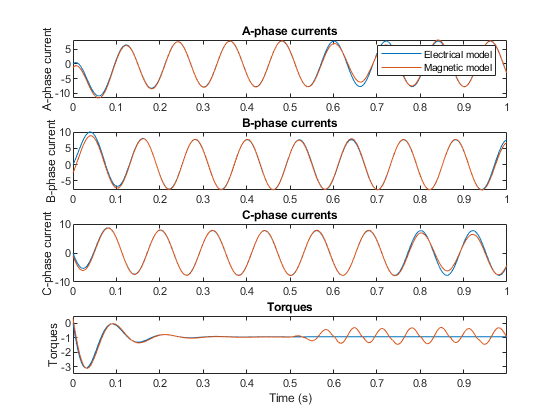
电动助力转向
此示例展示了如何使用永磁同步电机 (PMSM) 在汽车助力转向系统中放大驾驶员施加的力。
故障 PMSM 建模
此示例展示了如何使用 Simscape™ Electrical™ 对故障永磁同步电机 (PMSM) 进行建模。在对 PMSM 进行建模时,您通常可以将每个绕组表示为一个单一实体,该实体具有关联电感、感应反电动势 (EMF) 以及与相邻绕组的互感耦合。然而,当发生绕组故障时,这种单一实体的假设便不再成立。为了正确捕获由此产生的动态特性,必须在绕组槽级别对电机进行建模。这需要在磁域中进行建模。
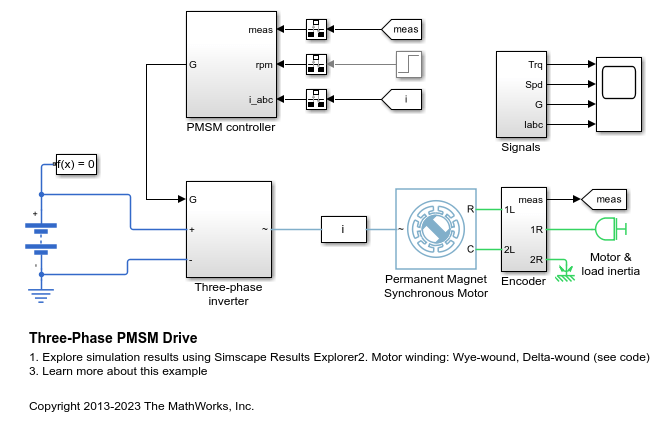
三相 PMSM 驱动建模
此示例展示了一个采用星型绕组和三角型绕组配置的永磁同步电机 (PMSM),以及一个适用于典型混合动力车辆的逆变器。该逆变器直接连接到车辆电池,但您也可以在两者之间实现一个 DC-DC 转换器阶段。使用该模型,通过选择架构和增益来设计 PMSM 控制器,从而实现期望的性能。为了检查 IGBT 开通和关断时序,请使用更详细的 N-Channel IGBT 模块替换 IGBT 器件。对于整车建模,请使用 Motor & Drive (System Level) 模块,以基于能量的模型来抽象 PMSM、逆变器和控制器。
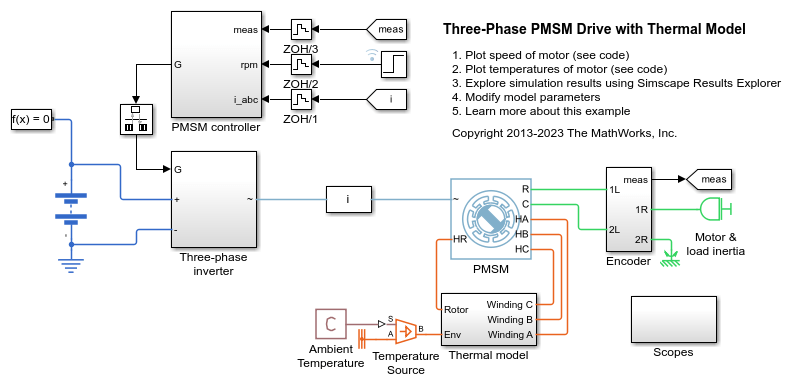
包含热模型的三相 PMSM 驱动
此示例展示了一个永磁同步电机 (PMSM) 以及一个适用于典型混合动力车辆的逆变器。该 PMSM 包含热模型和经验铁损。该逆变器直接连接到车辆电池,但您也可以在两者之间实现一个 DC-DC 转换器阶段。您可以使用此模型设计 PMSM 控制器,通过选择架构和增益来实现期望的性能。定子绕组和转子的初始温度设置为 25 摄氏度。环境温度为 27 摄氏度。Scopes 子系统包含示波器,可用于查看仿真结果。
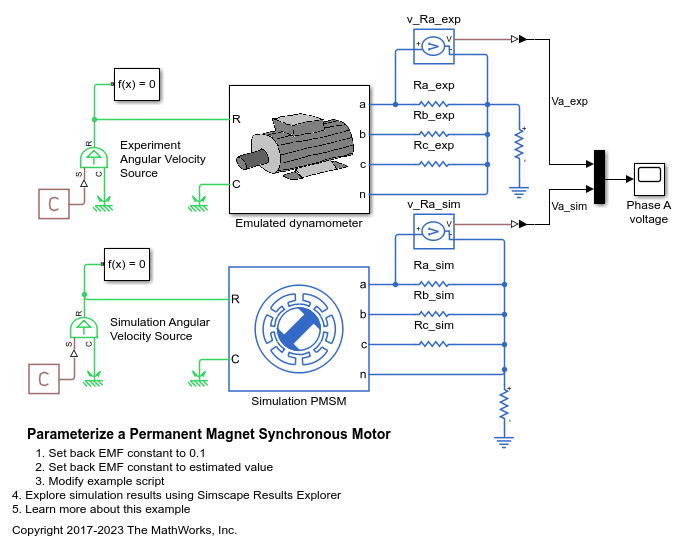
Parameterize a Permanent Magnet Synchronous Motor
Estimate the back EMF and torque constants of a blackbox permanent magnet synchronous motor (PMSM) with an unknown flux linkage. You can use either the back EMF or torque constant to describe the flux linkage and parameterize a Simscape™ Electrical™ PMSM block. This parameterization allows you to accurately replicate the blackbox motor's behavior in simulation.

IPMSM 转矩控制
此示例展示了如何控制基于内置式永磁同步电机 (IPMSM) 的汽车电力牵引驱动装置中的转矩。高压电池通过受控三相转换器为 IPMSM 供电。IPMSM 根据负载以电机模式和发电模式运行。理想角速度源提供负载。Control 子系统使用开环方法控制 IPMSM 转矩,并使用闭环方法控制电流。在每个采样时刻,转矩请求都会转换为相关的参考电流。电流控制基于 PI,并且其使用的采样率比转矩控制所用的采样率更快。仿真在电机模式和发电机模式下都使用了多个转矩阶跃。任务调度是在 Stateflow® 中设计的。Scopes 子系统包含示波器,可用于查看仿真结果。
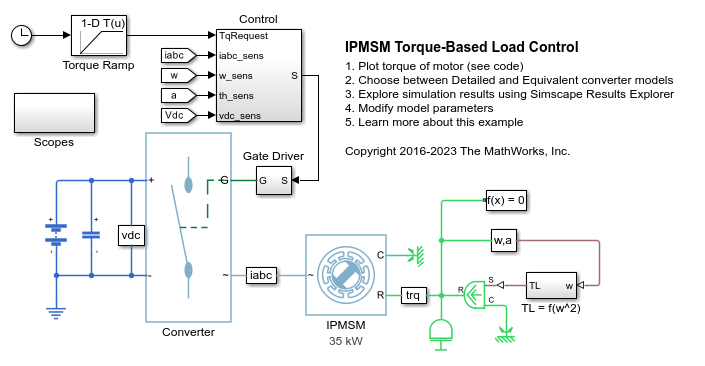
基于 IPMSM 转矩的负载控制
此示例展示了如何控制基于内置式永磁同步电机 (IPMSM) 的驱动装置中的转矩。高压电池通过受控三相逆变器为 IPMSM 供电。向电机控制器提供一个转矩请求斜坡信号。负载转矩与转子转速呈二次方关系。Control 子系统使用开环方法控制 IPMSM 转矩,并使用闭环方法控制电流。在每个采样时刻,转矩请求都会转换为相关的参考电流。电流控制基于 PI,并且其使用的采样率比转矩控制所用的采样率更快。任务调度是在 Stateflow® 中设计的。Scopes 子系统包含示波器,可用于查看仿真结果。
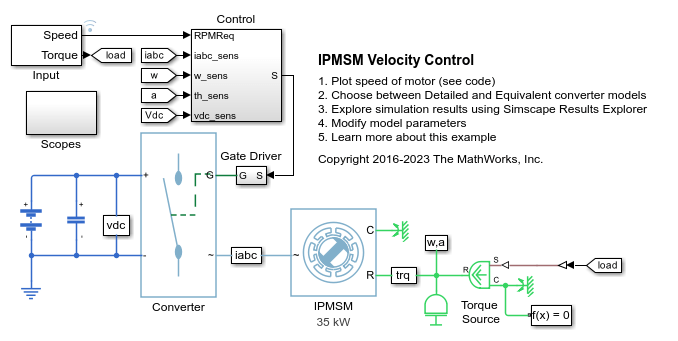
IPMSM 速度控制
此示例展示了如何控制基于内置式永磁同步电机 (IPMSM) 的汽车电力牵引驱动装置中的转子角转速。高压电池通过受控三相转换器为 IPMSM 供电。IPMSM 根据负载以电机模式和发电模式运行。理想转矩源提供负载。Scopes 子系统包含示波器,可用于查看仿真结果。Control 子系统包含基于 PI 的多速率级联控制结构,该结构具有一个外层角速度控制环和两个内层电流控制环。Control 子系统中的任务调度以 Stateflow® 状态机的形式实现。在时长一秒的仿真过程中,角速度需求为 0 rpm、500 rpm、2000 rpm,然后是 3000 rpm。

控制带开放端绕组的三相 PMSM 的速度
此示例展示了如何控制带开放端绕组的内置式永磁同步电机 (IPMSM) 中的转子角转速。高压电池通过两个受控三相转换器为 IPMSM 供电。IPMSM 根据负载以电机模式和发电模式运行。理想转矩源提供负载。Scopes 子系统包含示波器,可用于查看仿真结果。Control 子系统包含一个基于 PI 的磁场定向控制结构。在时长一秒的仿真过程中,角速度需求为 0 rpm、500 rpm、2000 rpm,然后是 3000 rpm。
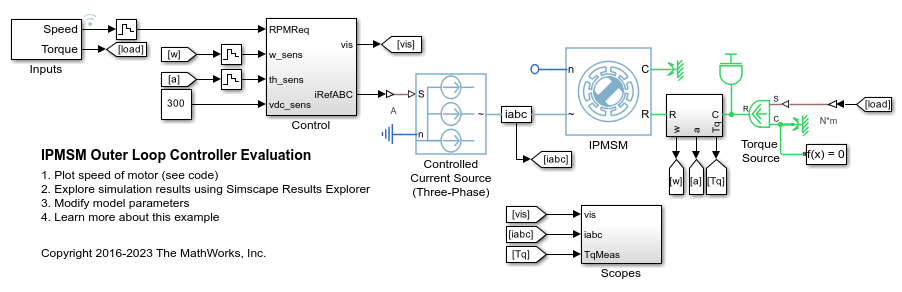
IPMSM 外环控制器评估
此示例展示了如何控制基于内置式永磁同步电机 (IPMSM) 的电力牵引驱动装置中的转子角速度。为了评估外环速度控制器,内环电流控制器被替换为三相受控电流源。理想转矩源提供负载。Scopes 子系统包含示波器,可用于查看仿真结果。Control 子系统包括基于 PI 的外环控制器。在时长三秒的仿真过程中,角速度需求为 -1000 rpm、2000 rpm、3000 rpm、4000 rpm,然后是 5000 rpm。
端口
守恒
参数
参考
[1] Kundur, P. Power System Stability and Control. New York, NY: McGraw Hill, 1993.
[2] Anderson, P. M. Analysis of Faulted Power Systems. Hoboken, NJ: Wiley-IEEE Press, 1995.
[3] Mellor, P.H., R. Wrobel, and D. Holliday. A computationally efficient iron loss model for brushless AC machines that caters for rated flux and field weakened operation. IEEE Electric Machines and Drives Conference. May 2009.