AC4 - DTC Induction 200 HP Motor Drive
This example shows the AC4 DTC Induction Motor Drive during speed regulation.
H.Blanchette, L.-A. Dessaint (Ecole de technologie superieure, Montreal)
Description
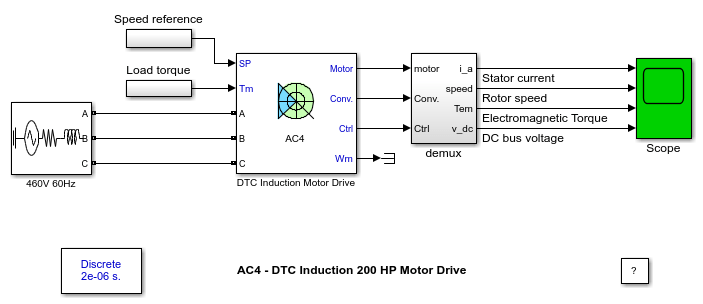
This circuit uses the AC4 block of Specialized Power Systems library. It models a direct torque control (DTC) induction motor drive with a braking chopper for a 200HP AC motor.
The induction motor is fed by a PWM voltage source inverter which is built using a Universal Bridge Block. The speed control loop uses a proportional-integral controller to produce the flux and torque references for the DTC block. The DTC block computes the motor torque and flux estimates and compares them to their respective reference. The comparators outputs are then used by an optimal switching table which generates the inverter switching pulses.
Motor current, speed, and torque signals are available at the output of the block.
Simulation
Start the simulation. You can observe the motor stator current, the rotor speed, the electromagnetic torque and the DC bus voltage on the scope. The speed set point and the torque set point are also shown.
At time t = 0 s, the speed set point is 500 rpm. Observe that the speed follows precisely the acceleration ramp.
At t = 0.5 s, the full load torque is applied to the motor shaft while the motor speed is still ramping to its final value. This forces the electromagnetic torque to increase to the user-defined maximum value (1200 N.m) and then to stabilize at 820 N.m once the speed ramping is completed and the motor has reached 500 rpm.
At t = 1 s, the speed set point is changed to 0 rpm. The speed decreases down to 0 rpm by following precisely the deceleration ramp even though the mechanical load is inverted abruptly, passing from 792 N.m to - 792 N.m, at t = 1.5 s. Shortly after, the motor speed stabilizes at 0 rpm.
Finally, note how well the DC bus voltage is regulated during the whole simulation period.
Notes
The power system has been discretised with a 2 us time step. The speed controller uses a 140 us sample and the DTC controller uses a 20 us sample time in order to simulate a microcontroller control device.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)