包含热模型的 BLDC 位置控制
此示例展示了如何控制基于 BLDC 的电力驱动装置中的转子角。该 BLDC 包含热模型和经验铁损。理想转矩源提供负载。Control 子系统采用基于 PI 的级联控制结构,包含三个控制环:一个外层位置控制环、一个转速控制环和一个内层电流控制环。BLDC 由受控的三相逆变器供电。逆变器的栅极信号通过霍尔信号获得。仿真使用阶跃参考信号。定子绕组和转子的初始温度设置为 25 摄氏度。环境温度为 27 摄氏度。Scopes 子系统包含示波器,可用于查看仿真结果。
模型

来自 Simscape 记录的仿真结果
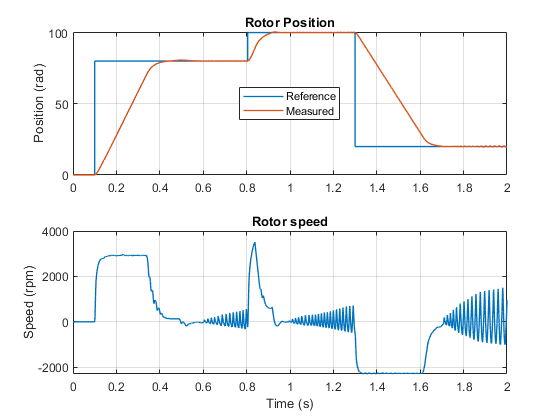
下图显示了测试中的请求角度和测得角度,以及电力驱动装置中的转子转速。
下图展示了电机的绕组和转子温度。

另请参阅
BLDC | Converter (Three-Phase)